YOLOv10 — истинное сквозное обнаружение целей в реальном времени (введение в принципы + детали кода + структурная блок-схема)
💡💡💡Основное содержание этой статьи: Сквозное обнаружение целей в режиме реального времени (введение в принцип + подробности кода + структурная блок-схема) | Как YOLOv10 обучает свой собственный набор данных (в данном случае NEU-DET)

1.Введение YOLov10
бумага: https://arxiv.org/pdf/2405.14458
Код: GitHub - THU-MIG/yolov10: YOLOv10: Real-Time End-to-End Object Detection
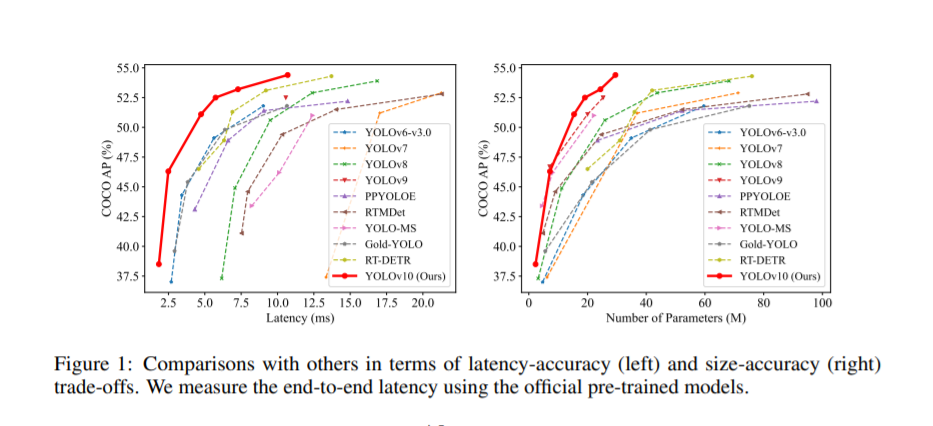
краткое содержание:в последние несколько лет,Благодаря эффективному балансу между вычислительными затратами и производительностью обнаружения.,YOLOS стал ведущей парадигмой в области обнаружения объектов в реальном времени. Исследователи изучили архитектурный дизайн YOLOS, цели оптимизации, стратегии увеличения данных и т. д.,и добились значительного прогресса. Однако,Использование немаксимального подавления (NMS) для постобработки препятствует сквозному развертыванию YOLOS и влияет на задержку вывода.также,В конструкции каждого компонента YOLOS отсутствует всесторонняя и тщательная проверка.,что приводит к значительной вычислительной избыточности,ограничивает производительность модели. Это приводит к неоптимальной эффективности,и значительный потенциал для улучшения производительности. в этой работе,Наша цель — еще больше расширить границы производительности и эффективности YOLOS как с точки зрения постобработки, так и с точки зрения архитектуры модели. с этой целью,Мы впервые предложилиНепрерывное двойное назначение для обучения YOLO без NMS,Такой подход приводит к конкурентной производительности и низкой задержке вывода. также,Мы также представляем общую стратегию проектирования моделей YOLOS, ориентированную на эффективность и точность. Мы полностью оптимизировали каждый компонент YOLOS с точки зрения эффективности и точности.,Значительно снижает вычислительные затраты,Улучшения производительности. Результатом наших усилий стала серия YOLO следующего поколения для сквозного обнаружения объектов в реальном времени.,Позвонил YOLOV10. Обширные эксперименты показывают,YOLOV10 обеспечивает высочайшую производительность и эффективность в различных масштабах моделей. Например,Под аналогичным AP на COCO,Наш YOLOV10-S в 1,8 раза быстрее, чем RT-DETR-R18.,Также имеет в 2,8 раза меньше параметров и FLOPS. По сравнению с YOLOV9-C,YOLOV10-B имеет такую же производительность.,Задержка уменьшена на 46 %,Параметры были уменьшены на 25%.
Какие улучшения есть в YOLOv10?
1.1 Назначение двойной метки
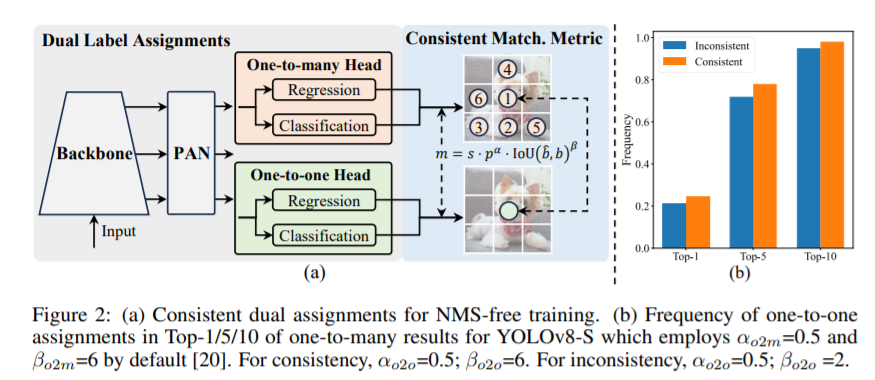
В процессе обучения YOLO [20, 59, 27, 64] обычно используют TAL [14] (обучение назначению задач). Назначьте несколько положительных образцов для каждого экземпляра. Использование распределения «один ко многим» может генерировать богатые сигналы мониторинга,провести оптимизацию и повысить производительность. Использование постобработки NMS приводит к неудовлетворительной эффективности вывода о развертывании. Хотя предыдущие исследования [49,60,73,5]Исследование соответствия один к одному для подавления избыточных прогнозов,Но они часто приводят к дополнительным затратам на вывод или приводят к неоптимальной производительности. в этой работе,Мы предлагаем стратегию тренировок йоло без НМС с назначением двойных меток и последовательной метрикой соответствия.,Достигаются высокая эффективность и конкурентоспособность.
1.2 Разработка модели, ориентированной на эффективность
Компоненты YOLO включают в себя начальный слой, слой понижающей дискретизации, сцену с основными строительными блоками и голову. Начальный слой требует минимальных вычислительных затрат, поэтому для остальных трех частей мы разрабатываем модель, ориентированную на эффективность.
(1) Упрощенная классификационная головка: в YOLO головки классификации и головки регрессии обычно имеют одну и ту же архитектуру. Однако они демонстрируют существенные различия в вычислительных затратах. Например, в YOLOv8-S количество FLOP (5,95G) и количество параметров (1,51M) главы классификации в 2,5 раза и 2,4 раза больше, чем у головы регрессии (2,34G/0,64M) соответственно. Однако после анализа влияния ошибок классификации и ошибок регрессии (см. Таблицу 6) мы обнаружили, что высота регрессии более важна для производительности YOLO. Таким образом, мы можем уменьшить накладные расходы на заголовок классификации без чрезмерного ущерба для производительности. Поэтому мы просто принимаем облегченную архитектуру для головы классификации, которая состоит из двух разделенных по глубине сверток [24, 8] с размером ядра свертки 3 × 3, за которыми следует свертка 1 × 1.
(2) Понижающая дискретизация с пространственным разделением каналов: YOLO обычно используют обычную стандартную свертку 3×3 с шагом 2 для одновременной реализации пространственной понижающей дискретизации (от H×W до H/2×W/2) и преобразования канала (от C до). 2С). Это приводит к значительным вычислительным затратам O(9HWC^2) и количеству параметров O(18C^2). Вместо этого мы предлагаем разделить операции уменьшения пространства и увеличения каналов, чтобы добиться более эффективной понижающей дискретизации. В частности, мы сначала используем двухточечную свертку для настройки размеров канала, а затем используем отделимую по глубине свертку для пространственной понижающей дискретизации. Это снижает вычислительные затраты до O(2HWC^2 + 9HWC), а количество параметров — до O(2C^2 + 18C). В то же время это максимизирует сохранение информации во время понижающей дискретизации, тем самым уменьшая задержку, сохраняя при этом конкурентоспособную производительность.
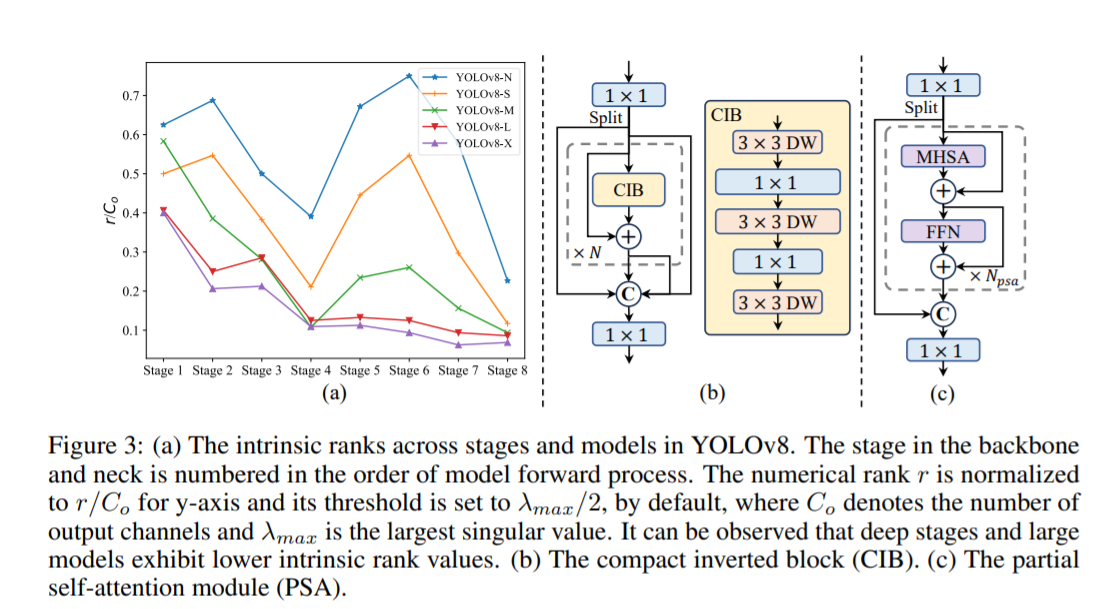
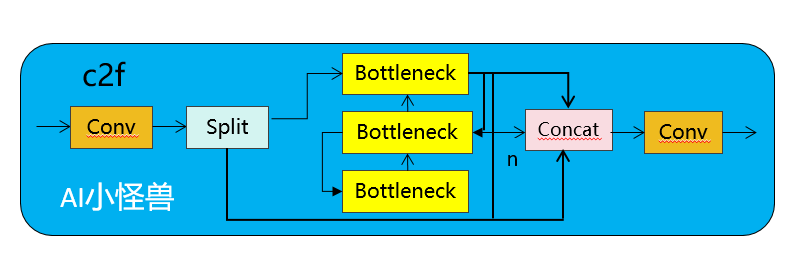
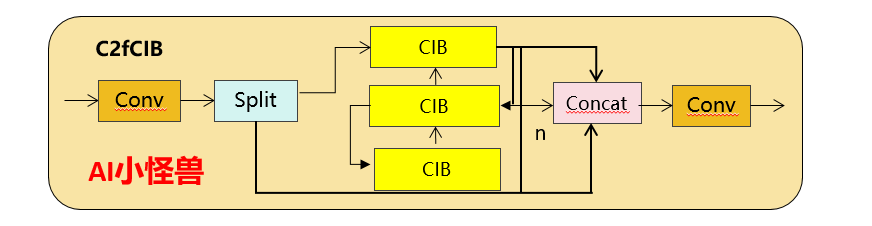
(3) Разработка модулей на основе рангов: YOLO обычно используют одни и те же базовые строительные блоки на всех этапах, например, блок «узких мест» в YOLOv8. Чтобы тщательно проверить эту однородную структуру YOLO, мы используем внутренний ранг для анализа избыточности каждого этапа. В частности, мы вычисляем числовой ранг последней свертки последнего базового блока на каждом этапе, который подсчитывает количество сингулярных значений, превышающих порог. На рисунке 3.(a) показаны результаты YOLOv8, показывающие, что глубокие этапы и большие модели с большей вероятностью будут проявлять большую избыточность. Это наблюдение предполагает, что простое применение одной и той же конструкции блока для всех этапов неоптимально для достижения оптимального компромисса между производительностью и эффективностью. Чтобы решить эту проблему, мы предлагаем схему блочного проектирования на основе рангов, целью которой является снижение сложности этапов, которые оказываются избыточными за счет компактного архитектурного проектирования. Сначала мы предлагаем структуру компактного инвертированного блока (CIB), в которой используются дешевые отделимые по глубине свертки для пространственного микширования и экономичные свертки «точка-точка» для микширования каналов, как показано на рисунке 3.(b). Он может служить эффективным базовым строительным блоком, например, встроенным в структуры ELAN (рис. 3.(b)). Затем мы выступаем за стратегию распределения блоков на основе рангов для достижения оптимальной эффективности при сохранении конкурентоспособности. В частности, для данной модели мы упорядочиваем все этапы в порядке возрастания в соответствии с их внутренним рангом. Далее рассмотрим изменения производительности при замене основных блоков ведущей ступени на CIB. Если ухудшения производительности по сравнению с заданной моделью нет, переходим к замене следующего этапа, в противном случае останавливаем процесс. В результате мы можем реализовать адаптивные компактные блочные конструкции на разных этапах и размерах моделей, достигая более высокой эффективности без ущерба для производительности.
1.3 Точное проектирование модели
(1) Свертка с большим ядром. Использование свертки с большим ядром, отделяемой по глубине, является эффективным способом расширения рецептивного поля и расширения возможностей модели. Однако простое их использование на всех этапах может привести к загрязнению мелких функций, используемых для обнаружения небольших объектов, а также к значительным накладным расходам ввода-вывода и задержкам на этапе высокого разрешения. Поэтому мы предлагаем использовать в CIB на глубокой стадии отделимые по глубине свертки с большим ядром. В частности, мы увеличиваем размер ядра второй отделимой по глубине свертки 3×3 в CIB до 7×7, следуя [37]. Кроме того, мы применяем метод структурной репараметризации, чтобы ввести еще одну отделимую по глубине ветвь свертки 3 × 3, чтобы облегчить проблему оптимизации без увеличения накладных расходов на вывод. Более того, по мере увеличения размера модели ее восприимчивое поле естественным образом расширяется, а выгода от использования больших сверток ядра уменьшается. Поэтому мы используем большие свертки ядра только для моделей небольшого размера.
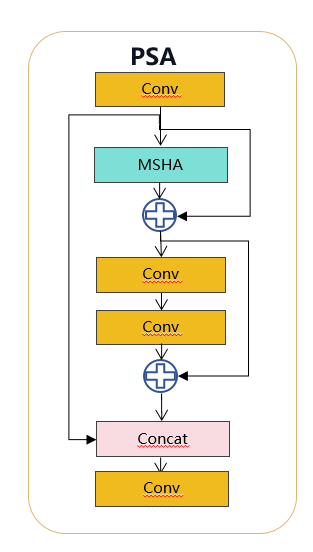
(2) Частичное самообслуживание (PSA). Механизм самообслуживания широко используется в различных визуальных задачах благодаря своим превосходным возможностям глобального моделирования. Однако он демонстрирует высокую вычислительную сложность и объем памяти. Чтобы решить эту проблему, учитывая повсеместную избыточность головы внимания, мы предлагаем эффективную конструкцию модуля частичного самообслуживания (PSA), как показано на рисунке 3.(c). В частности, мы разделяем объекты на две части равномерно после свертки 1×1. Мы только часть его передаем в блок NPSA, состоящий из многоголовочного модуля самообслуживания (MHSA) и сети прямой связи (FFN). Затем две части соединяются и сливаются с помощью свертки 1×1. Кроме того, мы следуем [21] для присвоения размеров запросов и ключей половине значений и заменяем LayerNorm на BatchNorm для быстрого вывода. Кроме того, PSA размещается только после этапа 4 с самым низким разрешением, что позволяет избежать чрезмерных накладных расходов, вызванных вторичной вычислительной сложностью самообслуживания. Таким образом, возможности обучения глобальному представлению могут быть включены в YOLO с низкими вычислительными затратами, что значительно расширяет возможности модели и повышает производительность.
2. Объяснение кода YOLOV10
2.1 Знакомство с C2fUIB
C2fUIB просто заменяет структуру «узкого места» C2f в YOLOv8 на структуру CIB.
Код реализации ultralytics/nn/modules/block.py
class CIB(nn.Module):
"""Standard bottleneck."""
def __init__(self, c1, c2, shortcut=True, e=0.5, lk=False):
"""Initializes a bottleneck module with given input/output channels, shortcut option, group, kernels, and
expansion.
"""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = nn.Sequential(
Conv(c1, c1, 3, g=c1),
Conv(c1, 2 * c_, 1),
Conv(2 * c_, 2 * c_, 3, g=2 * c_) if not lk else RepVGGDW(2 * c_),
Conv(2 * c_, c2, 1),
Conv(c2, c2, 3, g=c2),
)
self.add = shortcut and c1 == c2
def forward(self, x):
"""'forward()' applies the YOLO FPN to input data."""
return x + self.cv1(x) if self.add else self.cv1(x)
class C2fCIB(C2f):
"""Faster Implementation of CSP Bottleneck with 2 convolutions."""
def __init__(self, c1, c2, n=1, shortcut=False, lk=False, g=1, e=0.5):
"""Initialize CSP bottleneck layer with two convolutions with arguments ch_in, ch_out, number, shortcut, groups,
expansion.
"""
super().__init__(c1, c2, n, shortcut, g, e)
self.m = nn.ModuleList(CIB(self.c, self.c, shortcut, e=1.0, lk=lk) for _ in range(n))2.2 Введение в PSA
В частности, мы разделяем объекты на две части равномерно после свертки 1×1. Мы только часть его передаем в блок NPSA, состоящий из многоголовочного модуля самообслуживания (MHSA) и сети прямой связи (FFN). Затем две части соединяются и сливаются с помощью свертки 1×1. Кроме того, следуйте инструкциям, чтобы назначить размеры запросов и ключей половине значений, и замените LayerNorm на BatchNorm для быстрого вывода.
Код реализации ultralytics/nn/modules/block.py
class Attention(nn.Module):
def __init__(self, dim, num_heads=8,
attn_ratio=0.5):
super().__init__()
self.num_heads = num_heads
self.head_dim = dim // num_heads
self.key_dim = int(self.head_dim * attn_ratio)
self.scale = self.key_dim ** -0.5
nh_kd = nh_kd = self.key_dim * num_heads
h = dim + nh_kd * 2
self.qkv = Conv(dim, h, 1, act=False)
self.proj = Conv(dim, dim, 1, act=False)
self.pe = Conv(dim, dim, 3, 1, g=dim, act=False)
def forward(self, x):
B, _, H, W = x.shape
N = H * W
qkv = self.qkv(x)
q, k, v = qkv.view(B, self.num_heads, -1, N).split([self.key_dim, self.key_dim, self.head_dim], dim=2)
attn = (
(q.transpose(-2, -1) @ k) * self.scale
)
attn = attn.softmax(dim=-1)
x = (v @ attn.transpose(-2, -1)).view(B, -1, H, W) + self.pe(v.reshape(B, -1, H, W))
x = self.proj(x)
return x
class PSA(nn.Module):
def __init__(self, c1, c2, e=0.5):
super().__init__()
assert(c1 == c2)
self.c = int(c1 * e)
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv(2 * self.c, c1, 1)
self.attn = Attention(self.c, attn_ratio=0.5, num_heads=self.c // 64)
self.ffn = nn.Sequential(
Conv(self.c, self.c*2, 1),
Conv(self.c*2, self.c, 1, act=False)
)
def forward(self, x):
a, b = self.cv1(x).split((self.c, self.c), dim=1)
b = b + self.attn(b)
b = b + self.ffn(b)
return self.cv2(torch.cat((a, b), 1))2.3 SCDown
OLO обычно используют обычные стандартные свертки 3×3 с шагом 2, реализуя при этом пространственную понижающую дискретизацию (от H×W до H/2×W/2) и преобразование каналов (от C до 2C). Это приводит к значительным вычислительным затратам O(9HWC^2) и количеству параметров O(18C^2). Вместо этого мы предлагаем разделить операции уменьшения пространства и увеличения каналов, чтобы добиться более эффективной понижающей дискретизации. В частности, мы сначала используем двухточечную свертку для настройки размеров канала, а затем используем отделимую по глубине свертку для пространственной понижающей дискретизации. Это снижает вычислительные затраты до O(2HWC^2 + 9HWC), а количество параметров — до O(2C^2 + 18C). В то же время это максимизирует сохранение информации во время понижающей дискретизации, тем самым уменьшая задержку, сохраняя при этом конкурентоспособную производительность.
Код реализации ultralytics/nn/modules/block.py
class SCDown(nn.Module):
def __init__(self, c1, c2, k, s):
super().__init__()
self.cv1 = Conv(c1, c2, 1, 1)
self.cv2 = Conv(c2, c2, k=k, s=s, g=c2, act=False)
def forward(self, x):
return self.cv2(self.cv1(x))
3. Как тренировать YOLov10
3.1 Конфигурация среды
Загрузка исходного кода:
GitHub - THU-MIG/yolov10: YOLOv10: Real-Time End-to-End Object Detection
Установка окружающей среды:
conda create -n yolov10 python=3.9
conda activate yolov10
pip install -r requirements.txt
pip install -e .
3.2 NEU-DET обучает собственную модель YOLOv10
3.2.1 Введение в наборы данных
Вы можете использовать его, напрямую перенеся v8
3.2.2 Модификация гиперпараметра
Расположение следующее: default.yaml
3.2.3 Как тренироваться
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLOv10
if __name__ == '__main__':
model = YOLOv10('ultralytics/cfg/models/v10/yolov10n.yaml')
model.load('yolov10n.pt') # loading pretrain weights
model.train(data='data/NEU-DET.yaml',
cache=False,
imgsz=640,
epochs=200,
batch=16,
close_mosaic=10,
device='0',
optimizer='SGD', # using SGD
project='runs/train',
name='exp',
)
Оригинальная ссылка:
https://blog.csdn.net/m0_63774211/article/details/139225704



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
