Введение в основы радиолокации и моделирование MATLAB
Предисловие
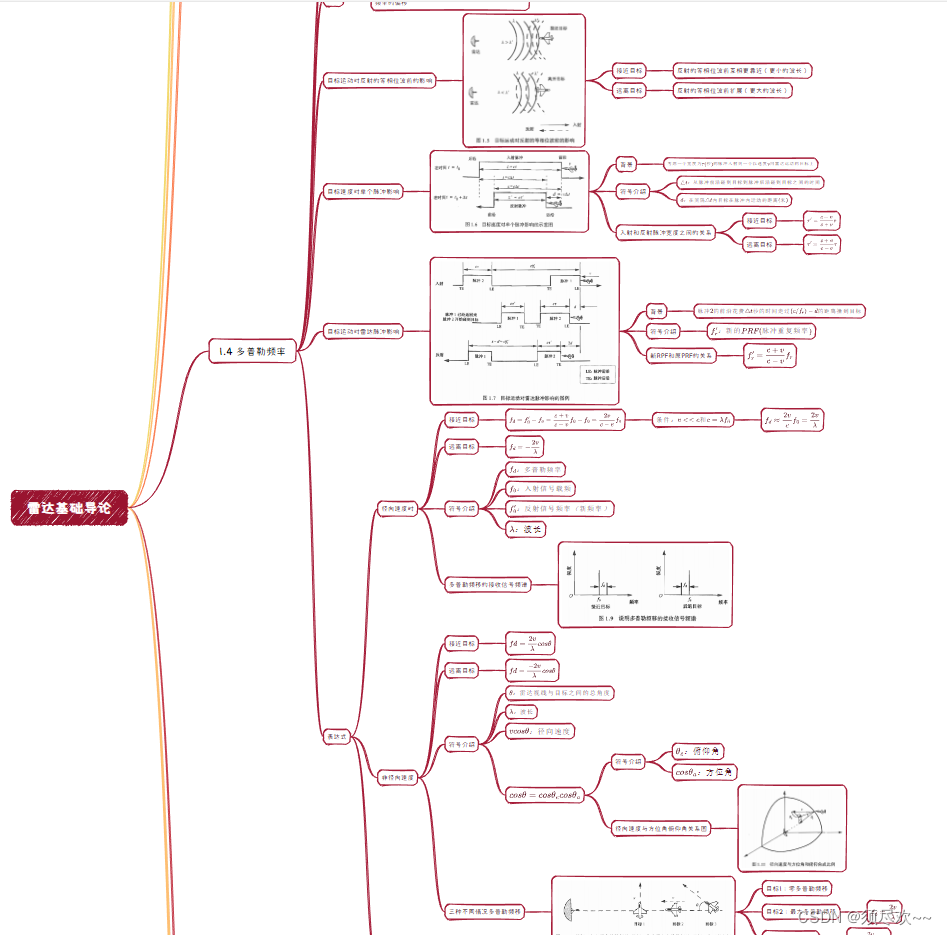
В этой статье представлено содержание базового введения в радар в форме интеллект-карты, а также объяснена и реализована соответствующая часть моделирования.
1. Введение в основы радиолокации
Интеллект-карта показана ниже. Если она вам нужна, перейдите в конец статьи, чтобы получить ее.
2. Моделирование в Matlab
1. Моделирование относительного расстояния обнаружения SNR
Уравнение радара:
Ниже приведено моделирование в Matlab отношения сигнал/шум (отношение сигнал/шум) относительно дальности обнаружения в условиях трех разных значений RCS (площади поперечного сечения радара) и трех разных значений пиковой мощности радара. .
①.Исходный код Matlab
radar_eq.m
function [snr] = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range)
% This program implements Eq. (1.56)
c = 3.0e+8; % speed of light
lambda = c / freq; % wavelength
p_peak = 10*log10(pt); % convert peak power to dB
lambda_sqdb = 10*log10(lambda^2); % compute wavelength square in dB
sigmadb = 10*log10(sigma); % convert sigma to dB
four_pi_cub = 10*log10((4.0 * pi)^3); % (4pi)^3 in dB
k_db = 10*log10(1.38e-23); % Boltzman's constant in dB
te_db = 10*log10(te); % noise temp. in dB
b_db = 10*log10(b); % bandwidth in dB
range_pwr4_db = 10*log10((range).^4); % vector of target range^4 in dB
% Implement Equation (1.56)
num = p_peak + g + g + lambda_sqdb + sigmadb;
den = four_pi_cub + k_db + te_db + b_db + nf + loss + range_pwr4_db;
snr = num - den;
returnСоответствующее описание параметра:
символ | описывать | единица | состояние |
|---|---|---|---|
pt | Пиковая мощность | W | входить |
freq | Центральная частота радара | Hz | входить |
g | Усиление антенны | dB | входить |
sigma | Целевая площадь поперечного сечения | m 2 m^2 m2 | входить |
te | Эффективная шумовая температура | K | входить |
b | пропускная способность | Hz | входить |
nf | коэффициент шума | dB | входить |
loss | потеря радара | dB | входить |
range | Целевое расстояние (единица или вектор) | m | входить |
snr | SNR (одиночная цена или вектор, в зависимости от расстояния вхождения) | dB | выход |
входитьteЭффективная шумовая температураKвходитьbпропускная способностьHzвходитьnfкоэффициент шумаdBвходитьlossпотеря радарадBвходитьдиапазон целевого расстояния (единица или вектор) mвходитьsnrSNR (одиночная ценить или вектор, на основе расстояния вхождения) д Бвыход
Функция «радар.м» создана для того, чтобы сделать ее идеальной для «расстояний»,Можно принять однозначную цену,или вектор, содержащий множество расстояний, ценить
fig1_12.m
close all
clear all
pt = 1.5e+6; % peak power in Watts
freq = 5.6e+9; % radar operating frequency in Hz
g = 45.0; % antenna gain in dB
sigma = 0.1; % radar cross section in m squared
te = 290.0; % effective noise temperature in Kelvins
b = 5.0e+6; % radar operating bandwidth in Hz
nf = 3.0; %noise figure in dB
loss = 6.0; % radar losses in dB
range = linspace(25e3,165e3,1000); % range to target from 25 Km 165 Km, 1000 points
snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range);
snr2 = radar_eq(pt, freq, g, sigma/10, te, b, nf, loss, range);
snr3 = radar_eq(pt, freq, g, sigma*10, te, b, nf, loss, range);
% plot SNR versus range
figure(1)
rangekm = range ./ 1000;
plot(rangekm,snr3,'k',rangekm,snr1,'k -.',rangekm,snr2,'k:')
grid
legend('\sigma = 0 dBsm','\sigma = -10dBsm','\sigma = -20 dBsm')
xlabel ('Detection range - Km');
ylabel ('SNR - dB');
snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range);
snr2 = radar_eq(pt*.4, freq, g, sigma, te, b, nf, loss, range);
snr3 = radar_eq(pt*1.8, freq, g, sigma, te, b, nf, loss, range);
figure (2)
plot(rangekm,snr3,'k',rangekm,snr1,'k -.',rangekm,snr2,'k:')
grid
legend('Pt = 2.16 MW','Pt = 1.5 MW','Pt = 0.6 MW')
xlabel ('Detection range - Km');
ylabel ('SNR - dB');②. Моделирование.
Параметры моделирования по умолчанию следующие: Пиковая мощность
МВт, рабочая частота
GHz,Усиление антенны
д Б, эффективная температура
K,потеря радара
dB,коэффициент шума
dB,радарпропускная способность
МГц, минимальная и максимальная дальность обнаружения радара составляет
км и
km,предполагалось Целевая площадь поперечного сечения
1) Моделирование относительного расстояния обнаружения различных RCS и SNR
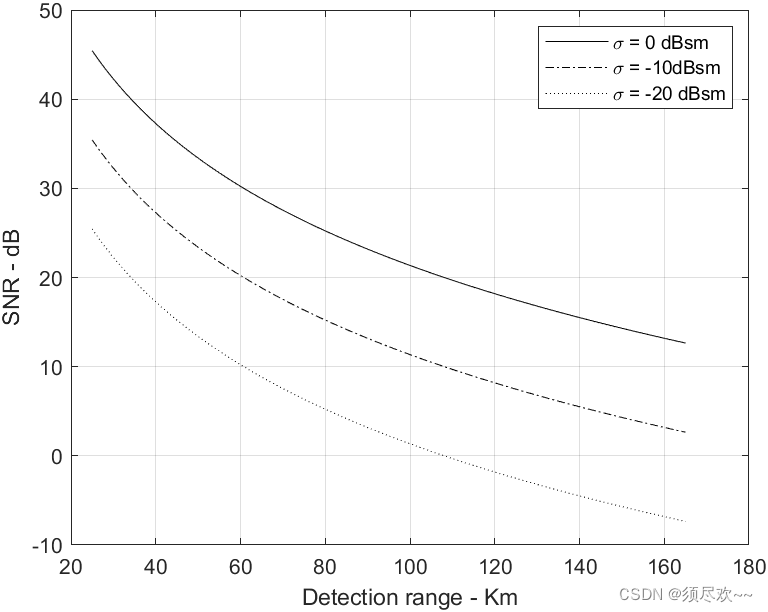
Для трех разных значений RCS, кривых зависимости SNR от расстояния обнаружения
Примечание: децибел на квадратный метр (д Бсм): выражается как десятикратный логарифм сечения радиолокационного рассеяния ценить, символ — σ. д Бсм, единица — децибел квадратный метр (д Бсм), который равен σ д Бсм=10lgσ. Например, R.C.S. ценить 0.1 Квадратные метры соответствуют -10 децибелы в квадрате (т. -10dBsm)。
Вывод: Из рисунка видно, что чем больше ЭПР (площадь поперечного сечения РЛС), тем больше отношение сигнал/шум РЛС, а с увеличением расстояния отношение сигнал/шум РЛС постепенно уменьшается;
2) Моделирование относительного расстояния обнаружения различных пиковых мощностей радара и отношения сигнал/шум.
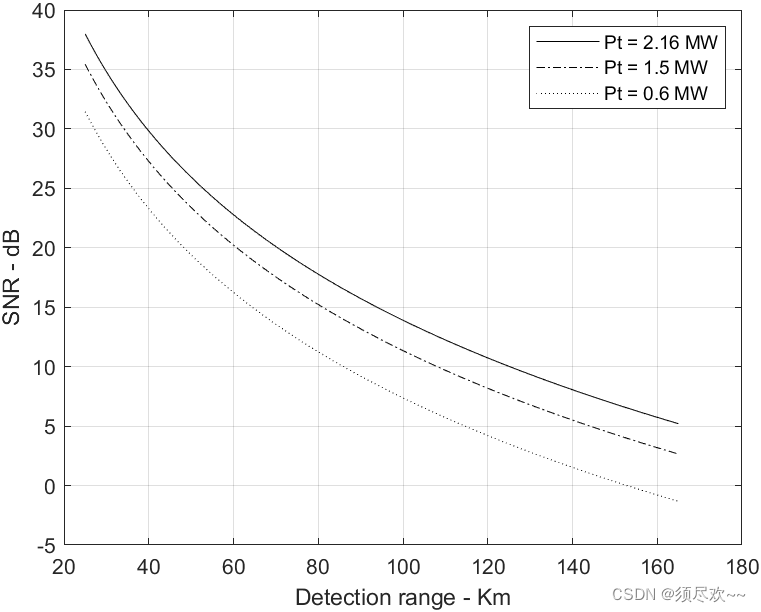
Радар Пиковая на три разных номера ценить мощность,SNR Кривая относительного расстояния обнаружения Вывод: видно из рисункарадар Пиковая Чем больше мощность, тем больше отношение сигнал/шум РЛС, а по мере увеличения расстояния отношение сигнал/шум РЛС постепенно уменьшается.
2. Ширина импульса в зависимости от требуемого моделирования отношения сигнал/шум
Порог обнаружения радара:
Длительность импульса можно определить
Ниже приведены относительные требования к ширине импульса в случае трех разных расстояний обнаружения.
①.Исходный код Matlab
fig1_13.m
close all
clear all
pt = 1.e+6; % peak power in Watts
freq = 5.6e+9; % radar operating frequency in Hz
g = 40.0; % antenna gain in dB
sigma = 0.1; % radar cross section in m squared
te =300.0; % effective noise temperature in Kelvins
nf = 5.0; %noise figure in dB
loss = 6.0; % radar losses in dB
range = [75e3,100e3,150e3]; % three range values
snr_db = linspace(5,20,200); % SNR values from 5 dB to 20 dB 200 points
snr = 10.^(0.1.*snr_db); % convert snr into base 10
gain = 10^(0.1*g); %convert antenna gain into base 10
loss = 10^(0.1*loss); % convert losses into base 10
F = 10^(0.1*nf); % convert noise figure into base 10
lambda = 3.e8 / freq; % compute wavelength
% Implement Eq.(1.57)
den = pt * gain * gain * sigma * lambda^2;
num1 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(1)^4 .* snr;
num2 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(2)^4 .* snr;
num3 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(3)^4 .* snr;
tau1 = num1 ./ den ;
tau2 = num2 ./ den;
tau3 = num3 ./ den;
% plot tau versus snr
figure(1)
semilogy(snr_db,1e6*tau1,'k',snr_db,1e6*tau2,'k -.',snr_db,1e6*tau3,'k:')
grid
legend('R = 75 Km','R = 100 Km','R = 150 Km')
xlabel ('Minimum required SNR - dB');
ylabel ('\tau (pulse width) in \mu sec');②. Моделирование.
параметры моделирования относятся к приведенному выше коду
Ниже приведены требования для различных расстояний обнаружения и длительности импульса: SNR моделирование
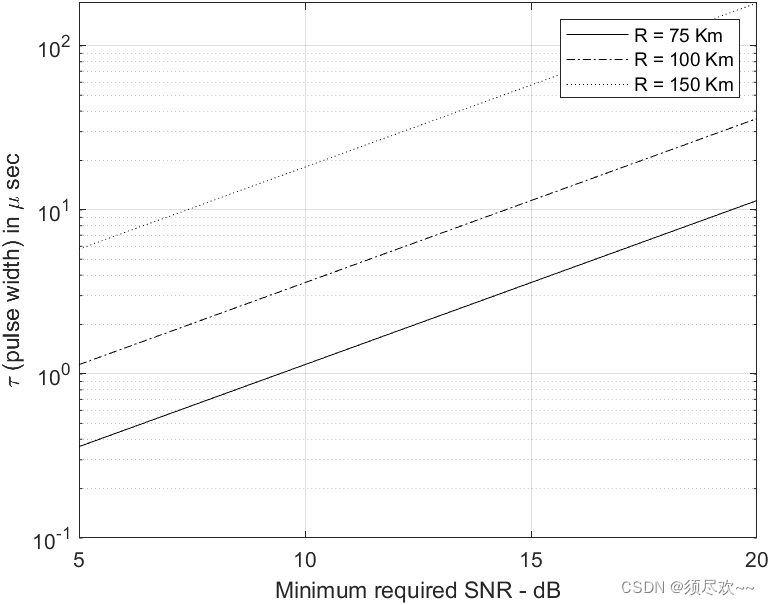
до трех разных Расстояние обнаружения числоценить, ширина импульса относительно требуемой SNR изгиб Вывод: Из рисунка видно, что с РЛС SNR С увеличением ширина импульса постепенно увеличивается, что соответствует тому же радару; SNR: чем дальше расстояние, тем шире необходимая ширина импульса
3. Моделирование произведения мощности апертуры относительно расстояния и моделирование средней мощности относительно размера апертуры.
поиск Уравнение радара:
Мощность апертуры:
①.Исходный код Matlab
power_aperture.m
function PAP = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle)
% This program implements Eq. (1.67)
Tsc = 10*log10(tsc); % convert Tsc into dB
Sigma = 10*log10(sigma); % convert sigma to dB
four_pi = 10*log10(4.0 * pi); % (4pi) in dB
k_db = 10*log10(1.38e-23); % Boltzman's constant in dB
Te = 10*log10(te); % noise temp. in dB
range_pwr4_db = 10*log10(range.^4); % target range^4 in dB
omega = (az_angle/57.296) * (el_angle / 57.296); % compute search volume in steraradians
Omega = 10*log10(omega); % search volume in dB
% implement Eq. (1.67)
PAP = snr + four_pi + k_db + Te + nf + loss + range_pwr4_db + Omega ...
- Sigma - Tsc;
returnСоответствующее описание параметра:
символ | описывать | единица | состояние |
|---|---|---|---|
snr | Чувствительность | dB | входить |
tsc | Время сканирования | s | входить |
sigma | Целевая площадь поперечного сечения | m 2 m^2 m2 | входить |
range | Целевое расстояние (единица или вектор) | m | входить |
te | Эффективная шумовая температура | K | входить |
nf | коэффициент шума | dB | входить |
loss | потеря радара | dB | входить |
az_angle | Азимутальный диапазон зоны поиска | ∘ ^\circ ∘ | входить |
el_angle | Диапазон углов тангажа зоны поиска | ∘ ^\circ ∘ | входить |
PAP | продукт с силовой апертурой | dB | выход |
входитьдальность целевого расстояния (единица или вектор) мвходитьteЭффективная шумовая температураKвходитьnfкоэффициент шумаdBвходитьlossпотеря радараdBвходитьaz_angleАзимутальный диапазон зоны поиска
входитьel_angleДиапазон углов тангажа зоны поиска
входитьPAPпродукт с силовой апертуройdBвыход
fig1_16.m
close all
clear all
tsc = 2.5; % Scan time i s2.5 seconds
sigma = 0.1; % radar cross section in m sqaured
te = 900.0; % effective noise temperature in Kelvins
snr = 15; % desired SNR in dB
nf = 6.0; %noise figure in dB
loss = 7.0; % radar losses in dB
az_angle = 2; % search volume azimuth extent in degrees
el_angle = 2; %serach volume elevation extent in degrees
range = linspace(20e3,250e3,1000); % range to target from 20 Km 250 Km, 1000 points
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
% plot power aperture prodcut versus range
% figure 1.16a
figure(1)
rangekm = range ./ 1000;
plot(rangekm,pap1,'k',rangekm,pap2,'k -.',rangekm,pap3,'k:')
grid
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
xlabel ('Detection range in Km');
ylabel ('Power aperture product in dB');
% generate Figure 1.16b
lambda = 0.03; % wavelength in meters
G = 45; % antenna gain in dB
ae = linspace(1,25,1000);% aperture size 1 to 25 meter squared, 1000 points
Ae = 10*log10(ae);
range = 250e3; % rnage of interset is 250 Km
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
Pav1 = pap1 - Ae;
Pav2 = pap2 - Ae;
Pav3 = pap3 - Ae;
figure(2)
plot(ae,Pav1,'k',ae,Pav2,'k -.',ae,Pav3,'k:')
grid
xlabel('Aperture size in square meters')
ylabel('Pav in dB')
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')②. Моделирование.
Параметры моделирования по умолчанию следующие:
σ \sigma σ | T s c T_{sc} Tsc | θ e = θ a \theta_e=\theta_a θe=θa | R | T_e | n f ∗ l o s s nf*loss nf∗loss | s n r snr snr |
|---|---|---|---|---|---|---|
0.1 m 2 0.1m^2 0.1m2 | 2.5 s 2.5s 2.5s | 2 ∘ 2^\circ 2∘ | 252 k m 252km 252km | 900 K 900K 900K | 13 d B 13dB 13dB | 15 d B 15dB 15dB |
RT_e
1) Различная ЭПР, произведение мощности апертуры относительно моделирования расстояния
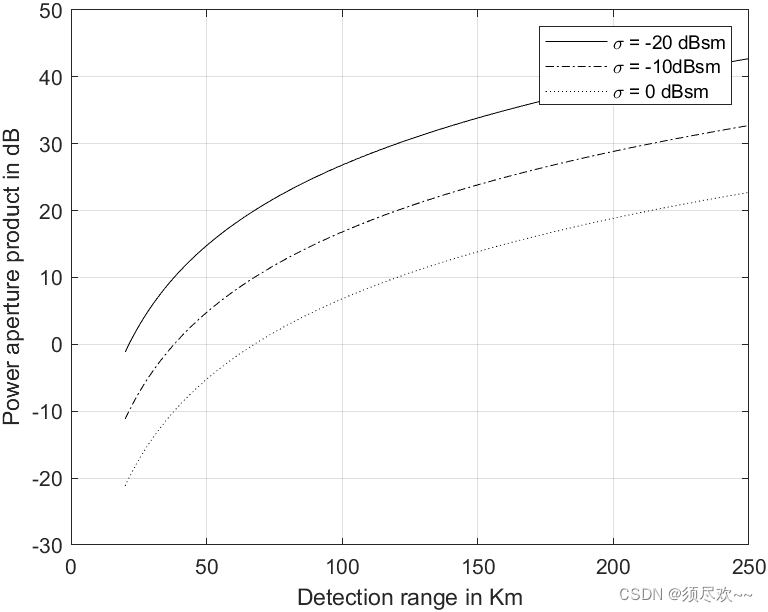
до трех разных RCS,продукт с силовой апертуры относительно расстояния обнаружения Вывод: видно из рисунок По мере увеличения расстояния обнаружения продукт с силовой увеличение апертуры радара; RCS Чем больше, продукт с силовой апертура тоже меньше
2) Моделирование средней мощности относительно размера апертуры для различных ЭПР
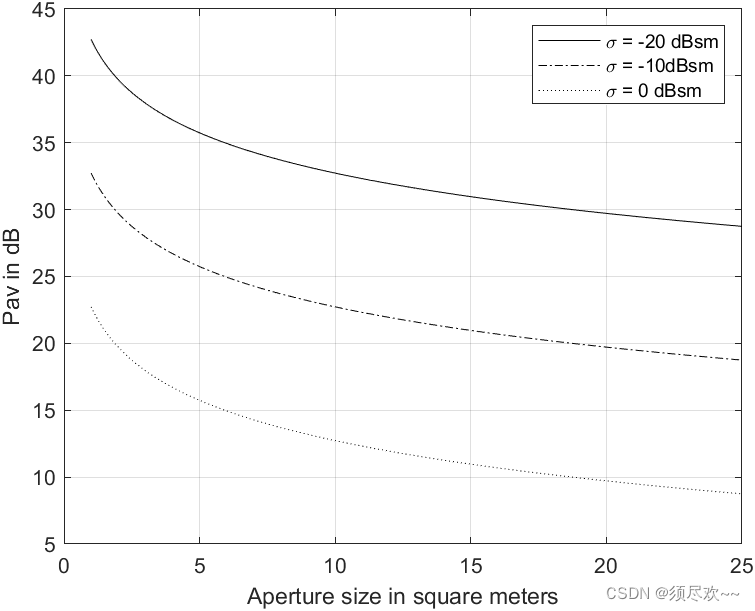
до трех разных RCS, средняя мощность радара относительно размера апертурыизгиб Вывод: Из рисунка видно, что с По мере увеличения размера РЛСапертуры средняя мощность радара имеет тенденцию к снижению; RCS Чем больше значение, тем меньше апертура радара.
4. Моделирование усиления SNR относительно накопленного количества импульсов.
- Последовательное накопление:
- Нет Последовательное накопление:
Примечание:
- это отношение сигнал/шум одного импульса, необходимое для обеспечения заданной вероятности обнаружения.
①.Исходный код Matlab
pulse_integration.m
function [snrout] = pulse_integration(pt, freq, g, sigma, te, b, nf, loss, range,np,ci_nci)
snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range) % single pulse SNR
snr1=0
if (ci_nci == 1) % coherent integration
snrout = snr1 + 10*log10(np);
else % non-coherent integration
if (ci_nci == 2)
snr_nci = 10.^(snr1./10);
val1 = (snr_nci.^2) ./ (4.*np.*np);
val2 = snr_nci ./ np;
val3 = snr_nci ./ (2.*np);
SNR_1 = val3 + sqrt(val1 + val2); % Equation 1.87 of text
LNCI = (1+SNR_1) ./ SNR_1; % Equation 1.85 of text
snrout = snr1 + 10*log10(np) - 10*log10(LNCI);
end
end
returnСоответствующее описание параметра:
символ | описывать | единица | состояние |
|---|---|---|---|
pt | Пиковая мощность | W | входить |
freq | Центральная частота радара | Hz | входить |
g | Усиление антенны | dB | входить |
sigma | Целевая площадь поперечного сечения | m 2 m^2 m2 | входить |
te | Эффективная шумовая температура | K | входить |
b | пропускная способность | Hz | входить |
nf | коэффициент шума | dB | входить |
loss | потеря радара | dB | входить |
range | Целевое расстояние (единица или вектор) | m | входить |
np | Накопленное количество импульсов | никто | входить |
ci_nci | 1 — КИ; 2 — НЦИ; | никто | входить |
snr | SNR (одиночная цена или вектор, в зависимости от расстояния вхождения) | dB | выход |
входитьteЭффективная шумовая температураKвходитьbпропускная способностьHzвходитьnfкоэффициент шумаdBвходитьlossпотеря радарадBвходитьдистанция до цели (единица или вектор) mвходитьnpНакопленное количество импульсовниктовходитьci_nci1 — КИ; 2 — НЦИ;никтовходитьsnrSNR (одинарная цена или вектор, в зависимости от расстояния вхождения) д Бвыход
fig1_21.m
clear all
close all
np = linspace(1,10000,1000);
snrci = pulse_integration(4,94.e9,47,20,290,20e6,7,10,5.01e3,np,1);
snrnci = pulse_integration(4,94.e9,47,20,290,20e6,7,10,5.01e3,np,2);
semilogx(np,snrci,'k',np,snrnci,'k:')
legend('Coherent integration','Non-coherent integration')
grid
xlabel ('Number of integrated pulses');
ylabel ('SNR - dB');②. Моделирование.
моделирование См. параметры выше Исходный код
В целом отношение сигнал/шум улучшается относительно количества накопленных импульсов.
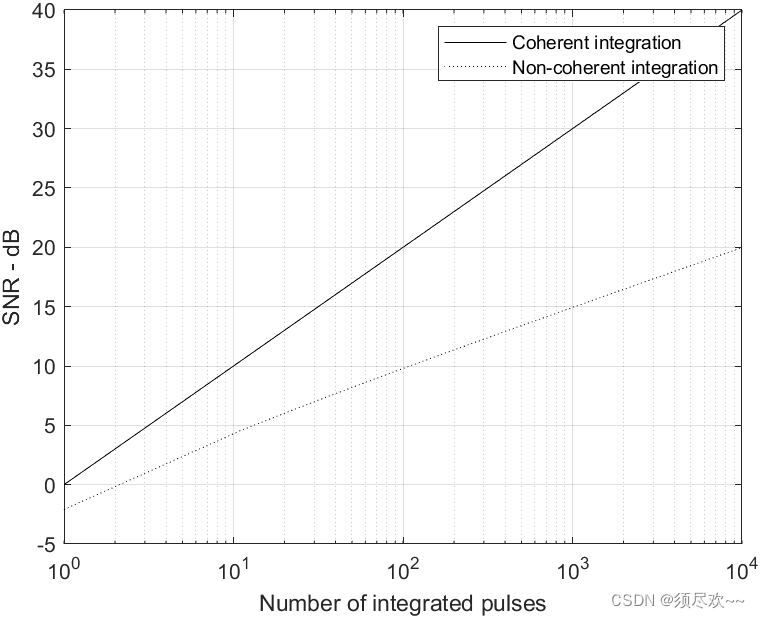
При использовании накопления SNR улучшать Вывод: видно из рисункавместе с Накопленное количество С увеличением импульсов отношение сигнал/шум РЛС постепенно увеличивается и при Накопленном; количество Когда импульсы равны, когерентное накопленное отношение сигнал/шум больше, чем некогерентное накопленное отношение сигнал/шум.



Углубленный анализ переполнения памяти CUDA: OutOfMemoryError: CUDA не хватает памяти. Попыталась выделить 3,21 Ги Б (GPU 0; всего 8,00 Ги Б).

[Решено] ошибка установки conda. Среда решения: не удалось выполнить первоначальное зависание. Повторная попытка с помощью файла (графическое руководство).

Прочитайте нейросетевую модель Трансформера в одной статье

.ART Теплые зимние предложения уже открыты

Сравнительная таблица описания кодов ошибок Amap

Уведомление о последних правилах Points Mall в декабре 2022 года.

Даже новички могут быстро приступить к работе с легким сервером приложений.

Взгляд на RSAC 2024|Защита конфиденциальности в эпоху больших моделей

Вы используете ИИ каждый день и до сих пор не знаете, как ИИ дает обратную связь? Одна статья для понимания реализации в коде Python общих функций потерь генеративных моделей + анализ принципов расчета.

Используйте (внутренний) почтовый ящик для образовательных учреждений, чтобы использовать Microsoft Family Bucket (1T дискового пространства на одном диске и версию Office 365 для образовательных учреждений)

Руководство по началу работы с оперативным проектом (7) Практическое сочетание оперативного письма — оперативного письма на основе интеллектуальной системы вопросов и ответов службы поддержки клиентов

[docker] Версия сервера «Чтение 3» — создайте свою собственную программу чтения веб-текста

Обзор Cloud-init и этапы создания в рамках PVE

Корпоративные пользователи используют пакет регистрационных ресурсов для регистрации ICP для веб-сайта и активации оплаты WeChat H5 (с кодом платежного узла версии API V3)

Подробное объяснение таких показателей производительности с высоким уровнем параллелизма, как QPS, TPS, RT и пропускная способность.

Удачи в конкурсе Python Essay Challenge, станьте первым, кто испытает новую функцию сообщества [Запускать блоки кода онлайн] и выиграйте множество изысканных подарков!

[Техническая посадка травы] Кровавая рвота и отделка позволяют вам необычным образом ощипывать гусиные перья! Не распространяйте информацию! ! !

[Официальное ограниченное по времени мероприятие] Сейчас ноябрь, напишите и получите приз

Прочтите это в одной статье: Учебник для няни по созданию сервера Huanshou Parlu на базе CVM-сервера.

Cloud Native | Что такое CRD (настраиваемые определения ресурсов) в K8s?

Как использовать Cloudflare CDN для настройки узла (CF самостоятельно выбирает IP) Гонконг, Китай/Азия узел/сводка и рекомендации внутреннего высокоскоростного IP-сегмента

Дополнительные правила вознаграждения амбассадоров акции в марте 2023 г.

Можно ли открыть частный сервер Phantom Beast Palu одним щелчком мыши? Супер простой урок для начинающих! (Прилагается метод обновления сервера)

[Играйте с Phantom Beast Palu] Обновите игровой сервер Phantom Beast Pallu одним щелчком мыши

Maotouhu делится: последний доступный внутри страны адрес склада исходного образа Docker 2024 года (обновлено 1 декабря)

Кодирование Base64 в MultipartFile

5 точек расширения SpringBoot, супер практично!

Глубокое понимание сопоставления индексов Elasticsearch.

15 рекомендуемых платформ разработки с нулевым кодом корпоративного уровня. Всегда найдется та, которая вам понравится.
