Внедрить ручную маркировку с помощью медиапайпа
Используйте медиапайп для выполнения отметки руки。получатьотметка После рук мы можем выполнять некоторые приложения, такие как отображение, использование жестов для выполнения некоторых элементов управления и т. д. В этой статье описывается использование opencv и mediapipe для обнаружения и отображения рук в камере (или видео), а также их маркировки и последующего применения отметки. руки управляют компьютером.
среда&Введение
opencv-python:Визуальная тематика。Чтение, запись и обработка изображений ивидео。
mediapipe:MediapipeдаGoogleПлатформа обработки мультимедиа с открытым исходным кодом。В этой статье используется версия0.10.2。
Установите их с помощью pip:
pip install opencv-python
pip install mediapipe
Введение с официального сайта mediapipe: Локальное машинное обучение поддерживает распространенные визуальные задачи: обнаружение целей, классификация изображений, сегментация, отслеживание рук, распознавание жестов и т. д. Предоставляет интерфейсы Andorid, JS и Python. Официальный сайт: https://developers.google.com/mediapipe.
отметка руки
1. Используйте opencv, чтобы получить изображение
Используйте opencv для вызова камеры, чтения изображения и отображения его.
import cv2
cap = cv2.VideoCapture(0) # Получите камеру, вместо этого вы также можете импортировать из видеофайла
while True:
success, img = cap.read() # Читать картинки из камеры
# Обработать изображение ...
cv2.imshow("image", img)
cv2.waitKey(1)Чтобы показать количество изображений, обрабатываемых в секунду (fps), вычислите интервал между двумя кадрами:
...
import time
previous_time = 0
current_time = 0
cap = cv2.VideoCapture(0) # Получить камеру
while True:
success, img = cap.read() # Читать картинки из камеры
# Обработать изображение ...
current_time = time.time()
fps = 1 / (current_time - previous_time) # Получить интервал между двумя дисплеями
previous_time = current_time
cv2.putText(img, str(round(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 2)
cv2.imshow("image", img)
cv2.waitKey(1)2. Используйте медиапайп для идентификации/маркировки рук.
Использование медиапайпа относительно просто. Вам нужно всего лишь создать экземпляр соответствующего объекта и передать изображение для получения результата.
import time
import cv2
import mediapipe as mp
cap = cv2.VideoCapture(0)
mp_hands = mp.solutions.hands
hands = mp_hands.Hands()
mp_draw = mp.solutions.drawing_utils # для рисования
pTime = 0
cTime = 0
while True:
success, img = cap.read()
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # Формат opencv по умолчанию — BGR, который необходимо преобразовать в RGB. Mediapipe справится с этим.
results = hands.process(imgRGB) # Вызовите метод процесса, чтобы обработать изображение и обнаружить руку.
if results.multi_hand_landmarks:
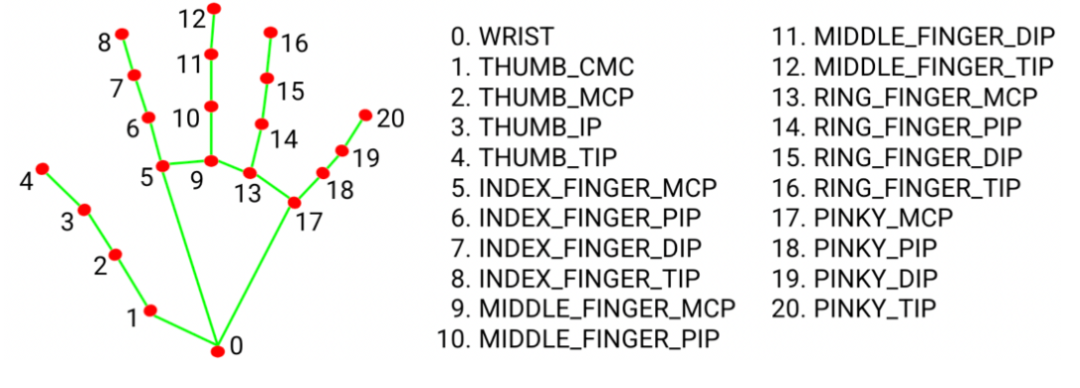
# results.multi_hand_landmarks — это список, каждый элемент которого представляет руку. Каждая рука имеет 20 маркеров положения.
for hand_landmark in results.multi_hand_landmarks:
mp_draw.draw_landmarks(img, hand_landmark, mp_hands.HAND_CONNECTIONS)
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(round(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 2)
cv2.imshow("image", img)
cv2.waitKey(1)Каждая рука имеет 20 координат, обозначающих различные части руки (например, пальцы, пятку ладони...).
Модульный
Чтобы облегчить повторное использование, мы записали часть обнаружения рук в класс:
import time
import cv2
import mediapipe as mp
class HandDetector():
def __init__(self, mode=False, max_hands=2, detection_conf=0.5, track_conf=0.5):
self.mode = mode
self.maxHands = max_hands
self.detection_conf = detection_conf
self.track_conf = track_conf
self.mp_hands = mp.solutions.hands
self.hands = self.mp_hands.Hands(self.mode, self.maxHands, 1, self.detection_conf, self.track_conf)
self.mp_draw = mp.solutions.drawing_utils
def find_hands(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mp_draw.draw_landmarks(img, handLms, self.mp_hands.HAND_CONNECTIONS)
return img
def find_position(self, img, hand_number=0, draw=True):
lm_list = []
if self.results.multi_hand_landmarks:
hand_landmarks = self.results.multi_hand_landmarks[hand_number]
for id, lm in enumerate(hand_landmarks.landmark):
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
lm_list.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 7, (255, 0, 255), cv2.FILLED)
return lm_list
def main():
pTime = 0
cTime = 0
cap = cv2.VideoCapture(0)
detector = HandDetector()
while True:
success, img = cap.read()
img = detector.find_hands(img)
lmList = detector.find_position(img)
if len(lmList) != 0:
print(lmList[0])
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(round(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 2)
cv2.imshow("image", img)
cv2.waitKey(1)
if __name__ == '__main__':
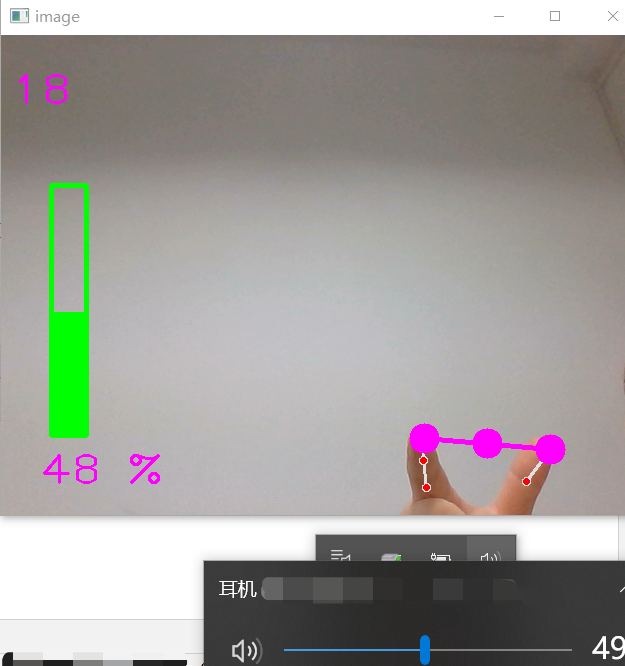
main()Регулятор громкости
Используйте отметка, реализованную выше. рукии система, которая может изменитьсяобъембиблиотека(pycaw),Можно управлять жестамиобъем:Посчитайте кончики двух больших и указательных пальцев.расстояние,и поставьрасстояниепреобразован вобъем。также,Opencv также используется для отображения информации об объеме изображения.
# proj 1 volume hand control
import math
import time
import cv2
import numpy as np
# pycaw Для контроля объема
from comtypes import CLSCTX_ALL
from pycaw.pycaw import AudioUtilities, IAudioEndpointVolume
from HnadTrackingModule import HandDetector
def main():
devices = AudioUtilities.GetSpeakers()
interface = devices.Activate(IAudioEndpointVolume._iid_, CLSCTX_ALL, None)
volume = interface.QueryInterface(IAudioEndpointVolume)
vol_now = volume.GetMasterVolumeLevel()
print("vol_now=",vol_now)
vol_range = volume.GetVolumeRange()
print("vol_range=", vol_range) # vol= (-63.5, 0.0, 0.5)
vol = 0
vol_bar = 400
vol_per = 0
min_vol, max_vol = vol_range[0], vol_range[1]
w_cam, h_cam = 640, 480
p_time = 0
c_time = 0
cap = cv2.VideoCapture(0)
cap.set(3, w_cam)
cap.set(4, h_cam)
detector = HandDetector(detection_conf=0.7)
while True:
success, img = cap.read()
img = detector.find_hands(img)
lm_list = detector.find_position(img, draw=False)
if len(lm_list) != 0:
print(lm_list[4], lm_list[8]) # Кончик большого и указательного пальца
x1, y1 = lm_list[4][1], lm_list[4][2]
x2, y2 = lm_list[8][1], lm_list[8][2]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2 # середина
cv2.circle(img, (x1, y1), 15, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), 15, (255, 0, 255), cv2.FILLED)
cv2.circle(img, (cx, cy), 15, (255, 0, 255), cv2.FILLED)
cv2.line(img, (x1, y1), (x2, y2), (255, 0, 255),3)
# 计算расстояние length = math.hypot(x2 - x1,y2 - y1)
# расстояниеиобъемпреобразование vol = np.interp(length, [10, 150], [min_vol, max_vol])
# объем Процентная сумма VolumeLevel не является линейной зависимостью.
level_percent = {-63.5: 0, -33.03: 10, -23.55: 20, -17.76: 30, -13.58: 40, -10.30: 50,
-7.61: 60, -5.32: 70, -3.33: 80, -1.57: 90, 0: 100}
xp = list(level_percent.keys())
fp = list(level_percent.values())
vol_per = np.interp(vol, xp, fp)
vol_bar = np.interp(vol_per, [0, 100], [400, 150])
print("length=", length) # 10 ~100
print("vol=", vol)
volume.SetMasterVolumeLevel(vol, None)
cv2.rectangle(img, (50, 150), (85, 400), (0, 255, 0), 3)
cv2.rectangle(img, (50, int(vol_bar)), (85, 400), (0, 255, 0), cv2.FILLED)
cv2.putText(img, f"{int(vol_per)} %", (40, 450), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 2)
c_time = time.time()
fps = 1 / (c_time - p_time)
p_time = c_time
cv2.putText(img, str(round(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 2)
cv2.imshow("image", img)
cv2.waitKey(1)
if __name__ == '__main__':
main()ссылка:
- 1. Advanced Computer Vision with Python - Full Course: https://www.youtube.com/watch?v=01sAkU_NvOY
- 2. документация по медиапайпу: https://developers.google.com/mediapipe/solutions/vision/hand_landmarker/python.
- 3. pycaw(Регулятор громкости): https://github.com/AndreMiras/pycaw



Углубленный анализ переполнения памяти CUDA: OutOfMemoryError: CUDA не хватает памяти. Попыталась выделить 3,21 Ги Б (GPU 0; всего 8,00 Ги Б).

[Решено] ошибка установки conda. Среда решения: не удалось выполнить первоначальное зависание. Повторная попытка с помощью файла (графическое руководство).

Прочитайте нейросетевую модель Трансформера в одной статье

.ART Теплые зимние предложения уже открыты

Сравнительная таблица описания кодов ошибок Amap

Уведомление о последних правилах Points Mall в декабре 2022 года.

Даже новички могут быстро приступить к работе с легким сервером приложений.

Взгляд на RSAC 2024|Защита конфиденциальности в эпоху больших моделей

Вы используете ИИ каждый день и до сих пор не знаете, как ИИ дает обратную связь? Одна статья для понимания реализации в коде Python общих функций потерь генеративных моделей + анализ принципов расчета.

Используйте (внутренний) почтовый ящик для образовательных учреждений, чтобы использовать Microsoft Family Bucket (1T дискового пространства на одном диске и версию Office 365 для образовательных учреждений)

Руководство по началу работы с оперативным проектом (7) Практическое сочетание оперативного письма — оперативного письма на основе интеллектуальной системы вопросов и ответов службы поддержки клиентов

[docker] Версия сервера «Чтение 3» — создайте свою собственную программу чтения веб-текста

Обзор Cloud-init и этапы создания в рамках PVE

Корпоративные пользователи используют пакет регистрационных ресурсов для регистрации ICP для веб-сайта и активации оплаты WeChat H5 (с кодом платежного узла версии API V3)

Подробное объяснение таких показателей производительности с высоким уровнем параллелизма, как QPS, TPS, RT и пропускная способность.

Удачи в конкурсе Python Essay Challenge, станьте первым, кто испытает новую функцию сообщества [Запускать блоки кода онлайн] и выиграйте множество изысканных подарков!

[Техническая посадка травы] Кровавая рвота и отделка позволяют вам необычным образом ощипывать гусиные перья! Не распространяйте информацию! ! !

[Официальное ограниченное по времени мероприятие] Сейчас ноябрь, напишите и получите приз

Прочтите это в одной статье: Учебник для няни по созданию сервера Huanshou Parlu на базе CVM-сервера.

Cloud Native | Что такое CRD (настраиваемые определения ресурсов) в K8s?

Как использовать Cloudflare CDN для настройки узла (CF самостоятельно выбирает IP) Гонконг, Китай/Азия узел/сводка и рекомендации внутреннего высокоскоростного IP-сегмента

Дополнительные правила вознаграждения амбассадоров акции в марте 2023 г.

Можно ли открыть частный сервер Phantom Beast Palu одним щелчком мыши? Супер простой урок для начинающих! (Прилагается метод обновления сервера)

[Играйте с Phantom Beast Palu] Обновите игровой сервер Phantom Beast Pallu одним щелчком мыши

Maotouhu делится: последний доступный внутри страны адрес склада исходного образа Docker 2024 года (обновлено 1 декабря)

Кодирование Base64 в MultipartFile

5 точек расширения SpringBoot, супер практично!

Глубокое понимание сопоставления индексов Elasticsearch.

15 рекомендуемых платформ разработки с нулевым кодом корпоративного уровня. Всегда найдется та, которая вам понравится.
