Улучшенная высокоточная сеть обнаружения поверхностных дефектов на базе YOLOv8, NEU-DET и GC10-DET имеет значительно повышенные баллы (оригинальные и собственной разработки)
💡💡💡Аннотация этой статьи: Улучшенное высокоточное обнаружение поверхностных дефектов на основе YOLOv8, Увеличение очевидно в задачах NEU-DET и GC10-DET;
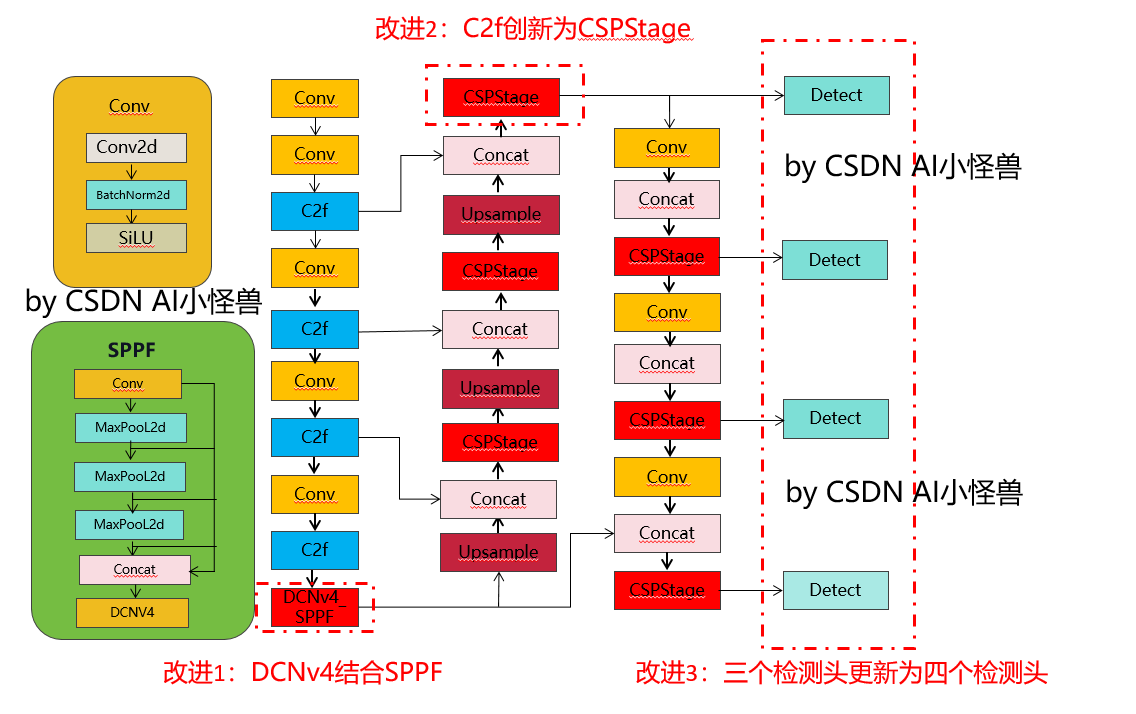
💡💡💡Инновации: 1) DCNv4 в сочетании с SPPF 2) C2f внесен в CSPStage 3) Три головки обнаружения заменены на четыре;
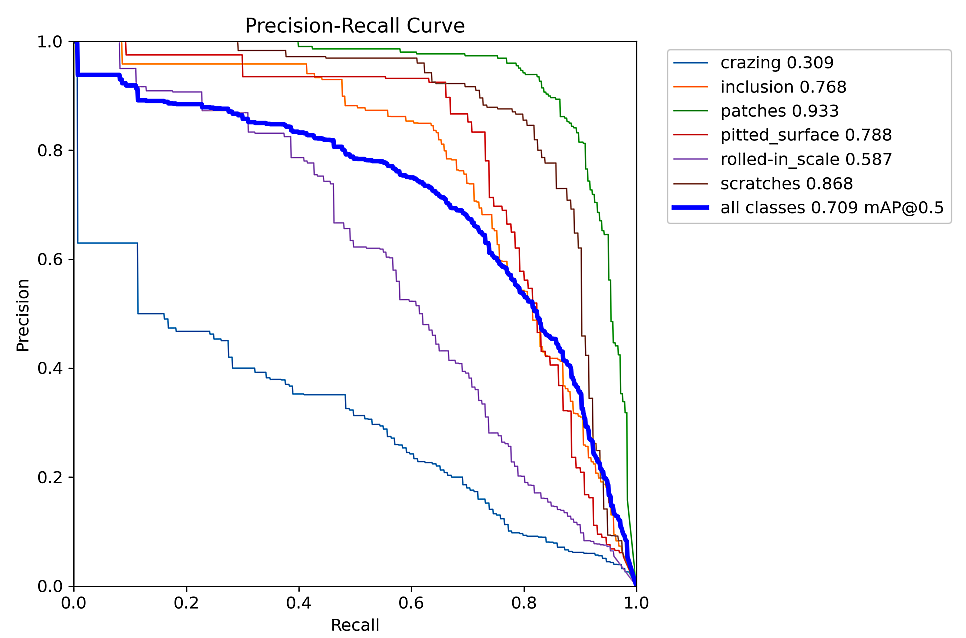
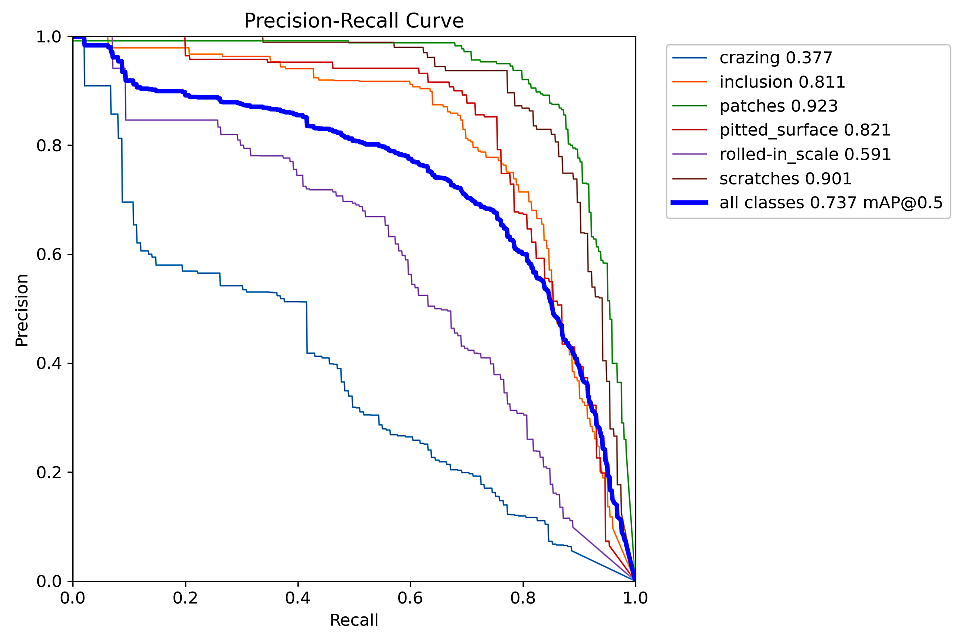
💡💡💡Нововведение: В задаче NEU-DEU mAP увеличено с исходного значения 0,709. Улучшено до 0,737.
1. Высокоточные улучшения YOLOv8.
Инновации: 1) DCNv4 в сочетании с SPPF 2) C2f внесен в CSPStage 3) Три головки обнаружения заменены на четыре;
1.1 Принцип DCNv4
Аннотация: Мы представляем Deformable Convolution v4 (DCNv4), эффективный оператор, предназначенный для широкого спектра приложений машинного зрения. DCNv4 устраняет ограничения своего предшественника DCNv3 с помощью двух ключевых улучшений: устранение нормализации softmax при пространственной агрегации, улучшение динамики и выразительности пространственной агрегации и оптимизация доступа к памяти для минимизации избыточных операций для увеличения скорости. Эти улучшения значительно ускоряют конвергенцию и значительно увеличивают скорость обработки по сравнению с DCNv3, при этом скорость пересылки DCNv4 более чем в три раза превышает скорость DCNv3. DCNv4 демонстрирует отличную производительность при выполнении различных задач, включая классификацию изображений, экземплярную и семантическую сегментацию и особенно генерацию изображений. При интеграции с генеративными моделями, такими как U-Net, в модели скрытой диффузии, DCNv4 превосходит свой базовый уровень, подчеркивая свой потенциал для улучшения генеративных моделей. В практических приложениях замена DCNv3 в модели InternImage на DCNv4 для создания FlashInternImage может увеличить скорость на 80 % без дальнейших модификаций и дополнительно повысить производительность. Достижения DCNv4 в скорости и эффективности, а также его высокая производительность в различных задачах машинного зрения демонстрируют его потенциал в качестве фундаментального строительного блока для будущих моделей машинного зрения.
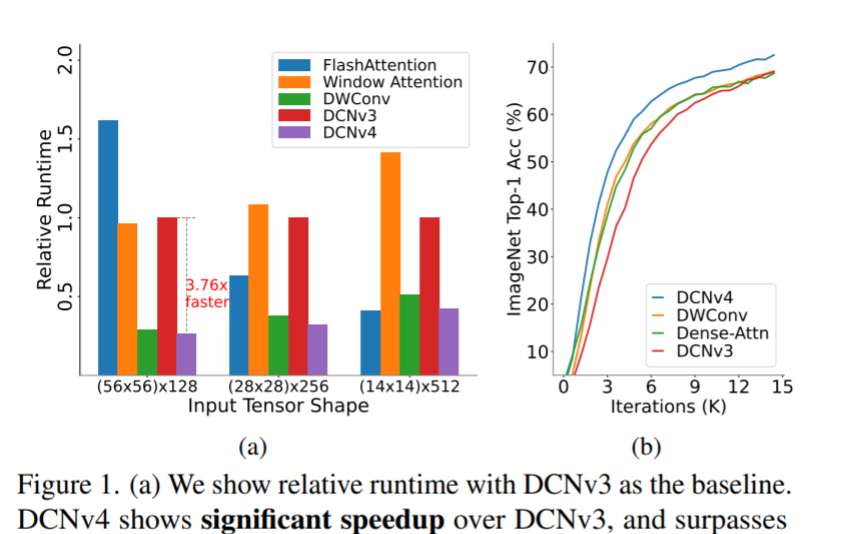
Как показано на рисунке 1. (а) Мы показываем относительное время работы, используя DCNv3 в качестве эталона. DCNv4 имеет значительное ускорение по сравнению с DCNv3 и превосходит других операторов общего машинного зрения. (б) При одинаковой сетевой архитектуре DCNv4 сходится быстрее, чем другие визуальные операторы, тогда как DCNv3 отстает от визуальных операторов на начальном этапе обучения.
1.2 Знакомство с CSPStage
бумага:https://arxiv.org/abs/2202.04256
Оригинальная ссылка:
Эта статья представляет собой работу Alibaba в области обнаружения целей (принята ICLR2022). Она предлагает новую архитектуру GiraffeDet, подобную «Giraffe», которая использует парадигму проектирования архитектуры с легкой магистралью и тяжелой шеей. Предлагаемый GiraffeDet достиг более высокой производительности, чем традиционная магистраль CNN, в наборе данных COCO, достигнув индекса mAP 54,1%, и имеет лучшую способность обрабатывать крупномасштабные изменения целей.
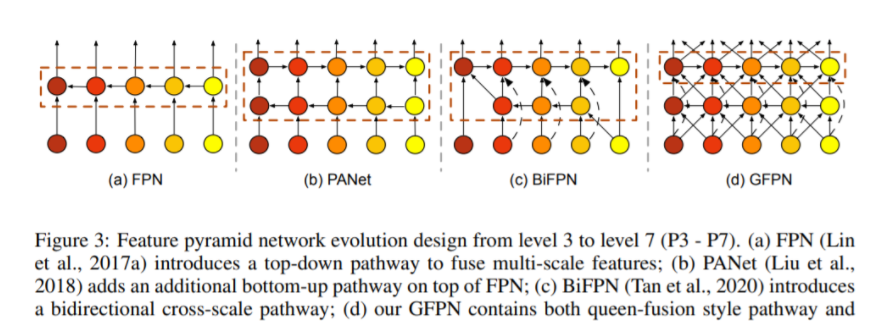
Целью FPN является объединение многомасштабных функций различного разрешения, извлеченных из магистральной сети CNN. На рисунке выше показана эволюция FPN: от первоначальной FPN до PANet и BiFPN. Отметим, что эти архитектуры FPN ориентированы только на объединение функций и не имеют внутриблочных связей. Поэтому мы разработали новый GFPN объединения путей: включая слои пропуска и межмасштабные соединения, см. рисунок d выше.
2. Анализ результатов эксперимента.
Наш метод обеспечивает лучшую производительность на NEU-DET и GC10-DET.
Миссия НЭУ-ДЭУ
Оригинальный yolov8n
Высокоточные улучшения YOLOv8
Исходная ссылка



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
