Цифровая обработка сигналов для FPGA: Verilog реализует простой FIR-фильтр.
В этом проекте показано, как реализовать простой КИХ-фильтр с заранее сгенерированными коэффициентами с помощью Verilog.
введение
Скромный КИХ-фильтр является одним из самых основных блоков цифровой обработки сигналов FPGA, поэтому важно понимать, как собрать воедино базовые блоки с заданным количеством отводов и соответствующими значениями коэффициентов. Поэтому в этом уроке по практическому введению в основы DSP на FPGA вы начнете с простого 15-отводного фильтра нижних частот FIR, сгенерируете для него начальные значения коэффициентов в Matlab, а затем преобразуете эти значения для написания модуля Verilog.
Конечная импульсная характеристика или КИХ-фильтр определяется как фильтр, импульсная характеристика которого устанавливается на нулевое значение в течение определенного периода времени. Время, необходимое для установления нуля импульсной характеристикой, напрямую связано с порядком фильтра (количеством отводов), который является порядком полинома базовой передаточной функции КИХ. Передаточная функция КИХ не включает обратную связь, поэтому, если вы вводите импульс со значением 1, а затем строку нулей, на выходе будут просто значения коэффициентов фильтра.
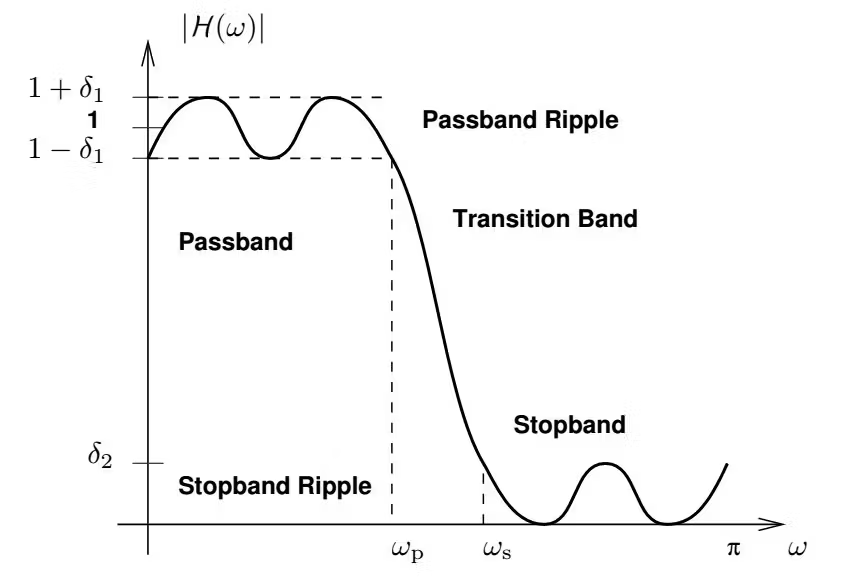
Функция фильтра в основном предназначена для формирования сигнала, в основном сосредотачиваясь на выборе частот, которые следует отфильтровать или пропустить. Одним из самых простых примеров является фильтр нижних частот, который пропускает частоты ниже определенного порога (частоты среза), одновременно значительно ослабляя частоты выше этого порога, как показано на рисунке ниже.
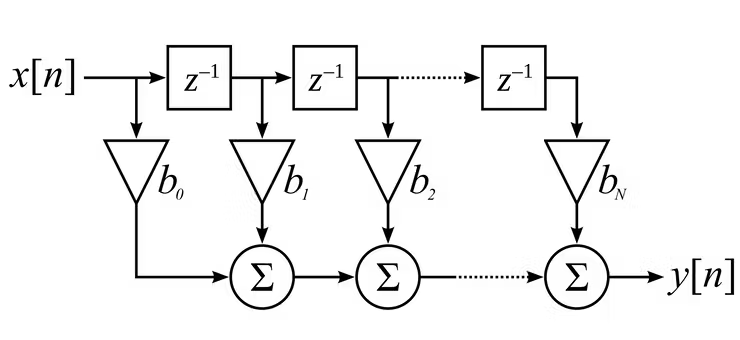
Основное внимание в этом проекте уделяется реализации FIR в HDL (в частности, Verilog), который можно разбить на три основных логических компонента: циклический буфер для синхронизации каждой выборки для надлежащего учета задержки последовательного ввода, множитель для каждого значение коэффициента отвода и аккумулятор для суммированного результата каждого выхода отвода.
Поскольку этот проект фокусируется на механизме проектирования FIR в логике FPGA, он использует инструмент FDA в Simulink и Matlab только для вставки некоторых простых параметров для фильтра нижних частот, а затем использует сгенерированные значения коэффициентов, чтобы поместить их в модуль Verilog, чтобы завершить проектирование фильтра (выполняется на следующем этапе).
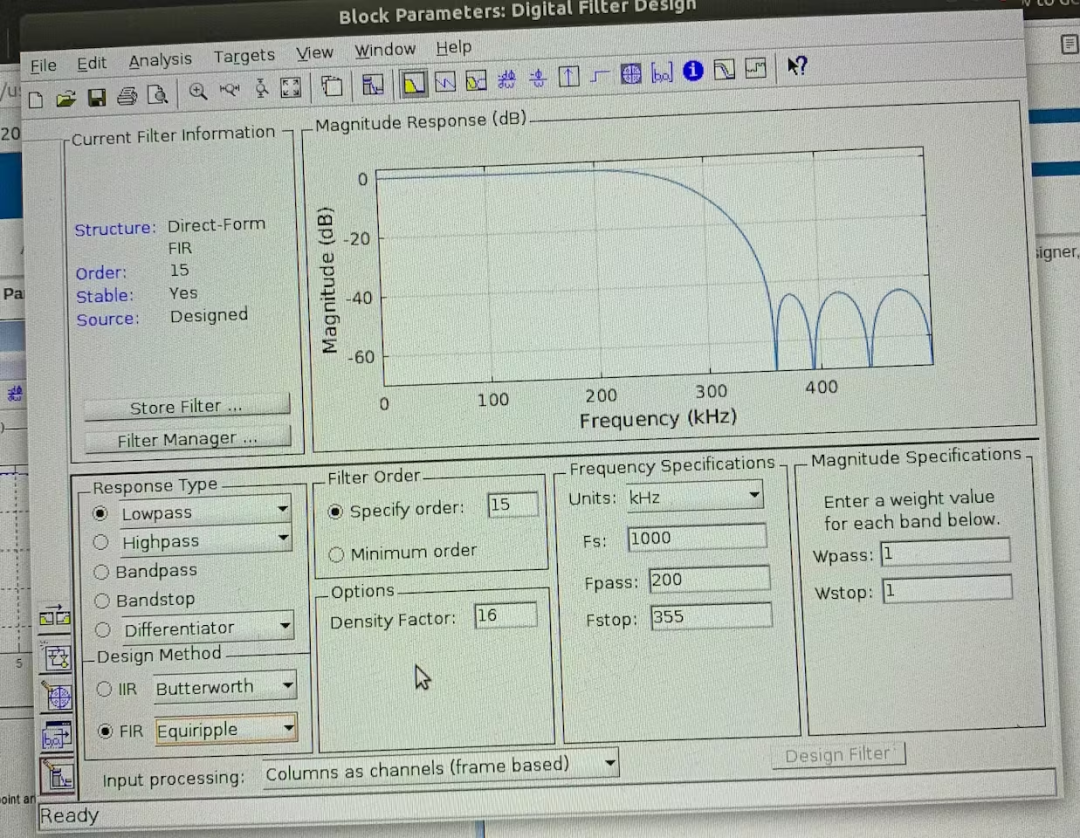
Выбор реализации простого КИХ-фильтра нижних частот с 15 отводами и частотой дискретизации 1 Мс/с, частотой полосы пропускания 200 к Гц и частотой полосы задерживания 355 к Гц приводит к получению следующих коэффициентов:
-0.0265
0
0.0441
0
-0.0934
0
0.3139
0.5000
0.3139
0
-0.0934
0
0.0441
0
-0.0265
Создание файлов дизайна для модулей FIR.
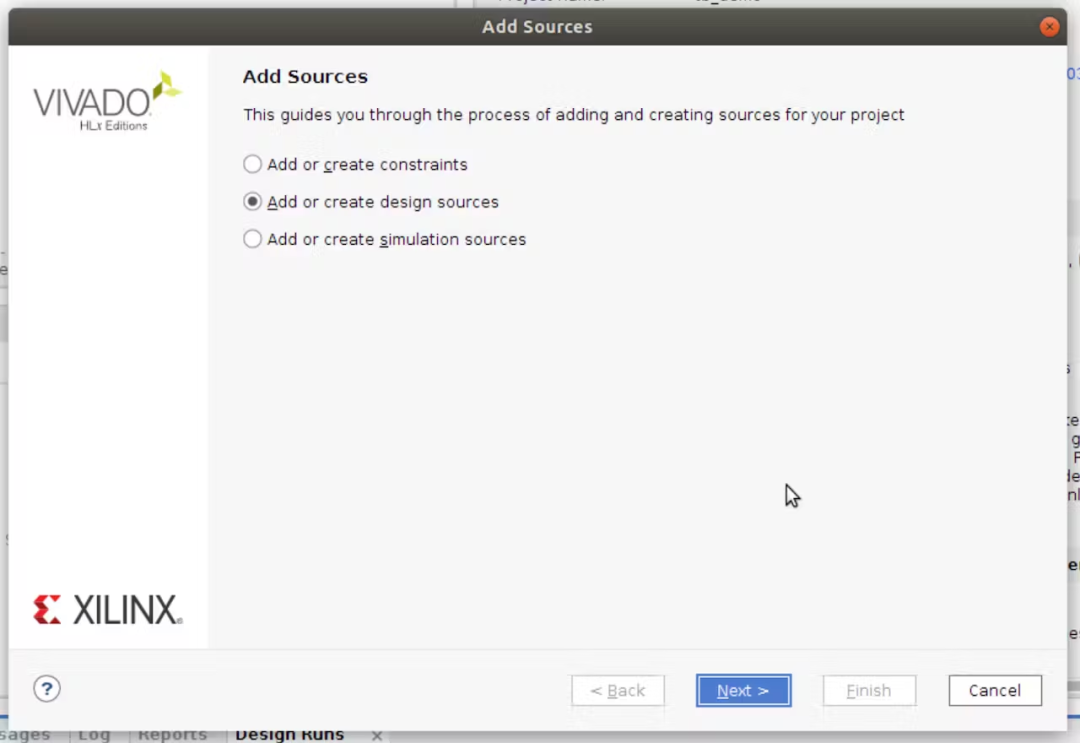
Добавьте исходные файлы в проект Vivado.
После определения порядка КИХ (количества отводов) и получения значений коэффициентов следующий набор параметров, которые необходимо определить, — это разрядность входных выборок, выходных выборок и самих коэффициентов.
Для этого FIR выберите установку регистров входной выборки и коэффициентов шириной 16 бит и установите регистр выходной выборки на 32 бита, поскольку произведение двух 16-битных значений представляет собой 32-битное значение (умножение ширины два значения дают ширину продукта, поэтому, если выбраны 16-битные входные выборки с 8-битными отводами, выходные выборки будут иметь ширину 24 бита).
Эти значения также имеют знак, поэтому в качестве знакового бита используется старший бит, что важно помнить при выборе начальной ширины регистра входной выборки. Чтобы установить эти значения для подписанных типов данных в Verilog, используйте ключевое слово Signed:
reg signed [15:0] register_name;
Следующее, что нужно решить, — как обрабатывать значения коэффициентов в Verilog. Значения десятичной точки необходимо преобразовать в значения с фиксированной точкой. Поскольку все значения коэффициентов меньше 1, для десятичного знака доступны все 15 бит регистра (всего 16 бит, старший бит — знаковый бит). Часто вам приходится решать, сколько бит в регистре вы хотите использовать для целой части числа, а не для дробной части числа. Таким образом, математические методы преобразования дробных значений: (значение дробного коэффициента)*(2^(15)) Дробное значение произведения округляется, и если коэффициент отрицательный, вычисляется дополнение до двух значений:
tap0 = twos(-0.0265 * 32768) = 0xFC9C
tap1 = 0
tap2 = 0.0441 * 32768 = 1445.0688 = 1445 = 0x05A5
tap3 = 0
tap4 = twos(-0.0934 * 32768) = 0xF40C
tap5 = 0
tap6 = 0.3139 * 32768 = 10285.8752 = 10285 = 0x282D
tap7 = 0.5000 * 32768 = 16384 = 0x4000
tap8 = 0.3139 * 32768 = 10285.8752 = 10285 = 0x282D
tap9 = 0
tap10 = twos(-0.0934 * 32768) = 0xF40C
tap11 = 0
tap12 = 0.0441 * 32768 = 1445.0688 = 1445 = 0x05A5
tap13 = 0
tap14 = twos(-0.0265 * 32768) = 0xFC9C
Теперь мы, наконец, готовы сосредоточиться на логике модуля FIR. Первый из них — это кольцевой буфер, который принимает последовательный поток входных выборок и создает массив из 15 входных выборок для 15 отводов фильтра.
always @ (posedge clk)
begin
if(enable_buff == 1'b1)
begin
buff0 <= in_sample;
buff1 <= buff0;
buff2 <= buff1;
buff3 <= buff2;
buff4 <= buff3;
buff5 <= buff4;
buff6 <= buff5;
buff7 <= buff6;
buff8 <= buff7;
buff9 <= buff8;
buff10 <= buff9;
buff11 <= buff10;
buff12 <= buff11;
buff13 <= buff12;
buff14 <= buff13;
end
end
Затем на этапе умножения каждая выборка умножается на каждое значение коэффициента:
/* Multiply stage of FIR */
always @ (posedge clk)
begin
if (enable_fir == 1'b1)
begin
acc0 <= tap0 * buff0;
acc1 <= tap1 * buff1;
acc2 <= tap2 * buff2;
acc3 <= tap3 * buff3;
acc4 <= tap4 * buff4;
acc5 <= tap5 * buff5;
acc6 <= tap6 * buff6;
acc7 <= tap7 * buff7;
acc8 <= tap8 * buff8;
acc9 <= tap9 * buff9;
acc10 <= tap10 * buff10;
acc11 <= tap11 * buff11;
acc12 <= tap12 * buff12;
acc13 <= tap13 * buff13;
acc14 <= tap14 * buff14;
end
end
Значение результата этапа умножения накапливается в регистре путем сложения и, наконец, становится потоком выходных данных фильтра.
/* Accumulate stage of FIR */
always @ (posedge clk)
begin
if (enable_fir == 1'b1)
begin
m_axis_fir_tdata <= acc0 + acc1 + acc2 + acc3 + acc4 + acc5 + acc6 + acc7 + acc8 + acc9 + acc10 + acc11 + acc12 + acc13 + acc14;
end
end
Наконец, последняя часть логики — это интерфейс, который передает данные в модуль FIR и из него. Интерфейс AXI Stream — один из наиболее распространенных интерфейсов. Ключевыми аспектами являются сигналы tready и tvalid, которые позволяют управлять потоком данных между вышестоящими и нижестоящими устройствами. Это означает, что модуль FIR должен предоставить сигнал tvalid своему нисходящему устройству, чтобы указать, что его выходные данные являются действительными данными, и иметь возможность приостановить (но при этом сохранить) свой вывод, если нисходящее устройство снимет свой сигнал готовности. Модуль FIR также должен иметь возможность работать так же, как вышестоящее устройство на своем первичном интерфейсе.
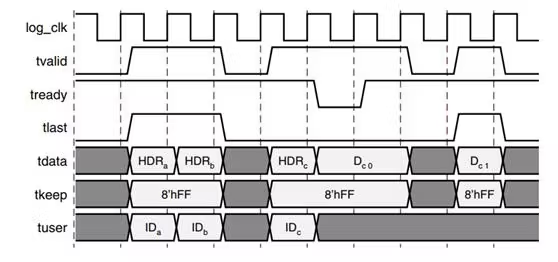
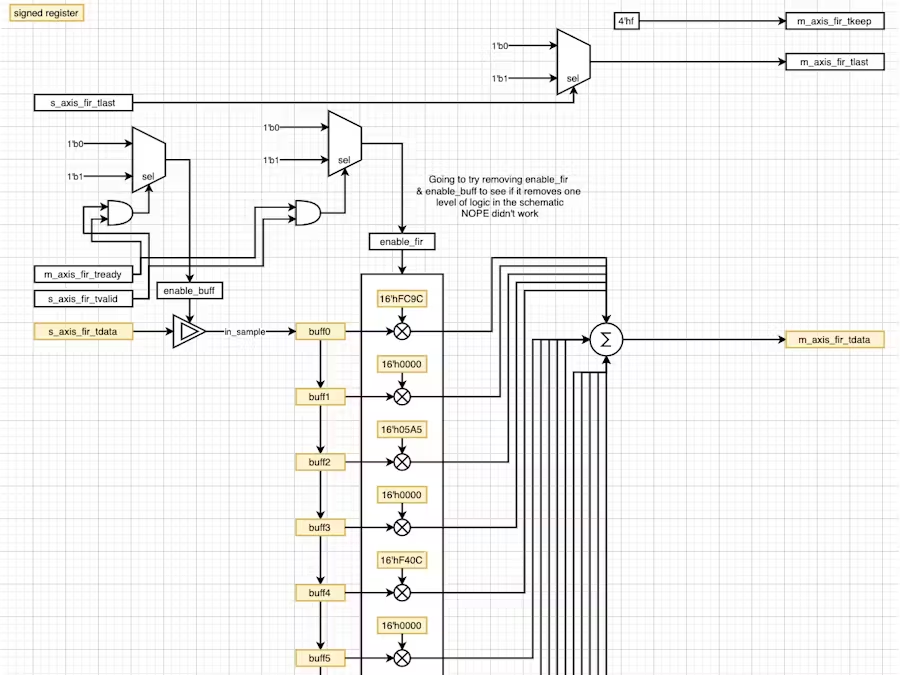
Ниже приводится обзор логической конструкции модуля FIR:
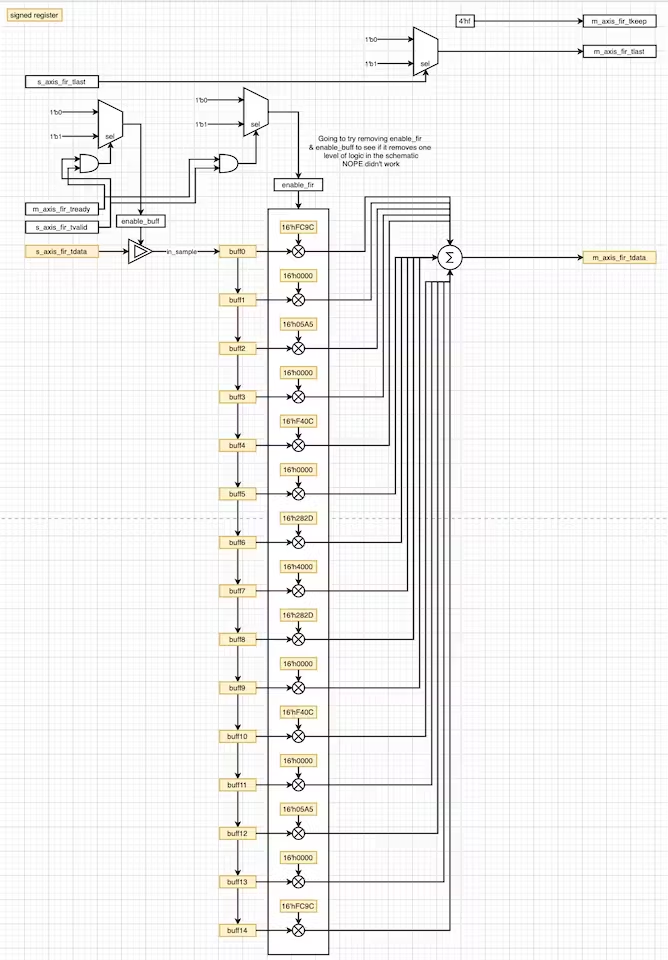
Обратите внимание, как сигналы tready и tvalid устанавливают значение включения входного кольцевого буфера и этап умножения FIR, а также как каждый регистр, через который проходят данные или коэффициенты, объявляется как подписанный.
Код Verilog модуля FIR:
`timescale 1ns / 1ps
module FIR(
input clk,
input reset,
input signed [15:0] s_axis_fir_tdata,
input [3:0] s_axis_fir_tkeep,
input s_axis_fir_tlast,
input s_axis_fir_tvalid,
input m_axis_fir_tready,
output reg m_axis_fir_tvalid,
output reg s_axis_fir_tready,
output reg m_axis_fir_tlast,
output reg [3:0] m_axis_fir_tkeep,
output reg signed [31:0] m_axis_fir_tdata
);
always @ (posedge clk)
begin
m_axis_fir_tkeep <= 4'hf;
end
always @ (posedge clk)
begin
if (s_axis_fir_tlast == 1'b1)
begin
m_axis_fir_tlast <= 1'b1;
end
else
begin
m_axis_fir_tlast <= 1'b0;
end
end
// 15-tap FIR
reg enable_fir, enable_buff;
reg [3:0] buff_cnt;
reg signed [15:0] in_sample;
reg signed [15:0] buff0, buff1, buff2, buff3, buff4, buff5, buff6, buff7, buff8, buff9, buff10, buff11, buff12, buff13, buff14;
wire signed [15:0] tap0, tap1, tap2, tap3, tap4, tap5, tap6, tap7, tap8, tap9, tap10, tap11, tap12, tap13, tap14;
reg signed [31:0] acc0, acc1, acc2, acc3, acc4, acc5, acc6, acc7, acc8, acc9, acc10, acc11, acc12, acc13, acc14;
/* Taps for LPF running @ 1MSps with a cutoff freq of 400kHz*/
assign tap0 = 16'hFC9C; // twos(-0.0265 * 32768) = 0xFC9C
assign tap1 = 16'h0000; // 0
assign tap2 = 16'h05A5; // 0.0441 * 32768 = 1445.0688 = 1445 = 0x05A5
assign tap3 = 16'h0000; // 0
assign tap4 = 16'hF40C; // twos(-0.0934 * 32768) = 0xF40C
assign tap5 = 16'h0000; // 0
assign tap6 = 16'h282D; // 0.3139 * 32768 = 10285.8752 = 10285 = 0x282D
assign tap7 = 16'h4000; // 0.5000 * 32768 = 16384 = 0x4000
assign tap8 = 16'h282D; // 0.3139 * 32768 = 10285.8752 = 10285 = 0x282D
assign tap9 = 16'h0000; // 0
assign tap10 = 16'hF40C; // twos(-0.0934 * 32768) = 0xF40C
assign tap11 = 16'h0000; // 0
assign tap12 = 16'h05A5; // 0.0441 * 32768 = 1445.0688 = 1445 = 0x05A5
assign tap13 = 16'h0000; // 0
assign tap14 = 16'hFC9C; // twos(-0.0265 * 32768) = 0xFC9C
/* This loop sets the tvalid flag on the output of the FIR high once
* the circular buffer has been filled with input samples for the
* first time after a reset condition. */
always @ (posedge clk or negedge reset)
begin
if (reset == 1'b0) //if (reset == 1'b0 || tvalid_in == 1'b0)
begin
buff_cnt <= 4'd0;
enable_fir <= 1'b0;
in_sample <= 8'd0;
end
else if (m_axis_fir_tready == 1'b0 || s_axis_fir_tvalid == 1'b0)
begin
enable_fir <= 1'b0;
buff_cnt <= 4'd15;
in_sample <= in_sample;
end
else if (buff_cnt == 4'd15)
begin
buff_cnt <= 4'd0;
enable_fir <= 1'b1;
in_sample <= s_axis_fir_tdata;
end
else
begin
buff_cnt <= buff_cnt + 1;
in_sample <= s_axis_fir_tdata;
end
end
always @ (posedge clk)
begin
if(reset == 1'b0 || m_axis_fir_tready == 1'b0 || s_axis_fir_tvalid == 1'b0)
begin
s_axis_fir_tready <= 1'b0;
m_axis_fir_tvalid <= 1'b0;
enable_buff <= 1'b0;
end
else
begin
s_axis_fir_tready <= 1'b1;
m_axis_fir_tvalid <= 1'b1;
enable_buff <= 1'b1;
end
end
/* Circular buffer bring in a serial input sample stream that
* creates an array of 15 input samples for the 15 taps of the filter. */
always @ (posedge clk)
begin
if(enable_buff == 1'b1)
begin
buff0 <= in_sample;
buff1 <= buff0;
buff2 <= buff1;
buff3 <= buff2;
buff4 <= buff3;
buff5 <= buff4;
buff6 <= buff5;
buff7 <= buff6;
buff8 <= buff7;
buff9 <= buff8;
buff10 <= buff9;
buff11 <= buff10;
buff12 <= buff11;
buff13 <= buff12;
buff14 <= buff13;
end
else
begin
buff0 <= buff0;
buff1 <= buff1;
buff2 <= buff2;
buff3 <= buff3;
buff4 <= buff4;
buff5 <= buff5;
buff6 <= buff6;
buff7 <= buff7;
buff8 <= buff8;
buff9 <= buff9;
buff10 <= buff10;
buff11 <= buff11;
buff12 <= buff12;
buff13 <= buff13;
buff14 <= buff14;
end
end
/* Multiply stage of FIR */
always @ (posedge clk)
begin
if (enable_fir == 1'b1)
begin
acc0 <= tap0 * buff0;
acc1 <= tap1 * buff1;
acc2 <= tap2 * buff2;
acc3 <= tap3 * buff3;
acc4 <= tap4 * buff4;
acc5 <= tap5 * buff5;
acc6 <= tap6 * buff6;
acc7 <= tap7 * buff7;
acc8 <= tap8 * buff8;
acc9 <= tap9 * buff9;
acc10 <= tap10 * buff10;
acc11 <= tap11 * buff11;
acc12 <= tap12 * buff12;
acc13 <= tap13 * buff13;
acc14 <= tap14 * buff14;
end
end
/* Accumulate stage of FIR */
always @ (posedge clk)
begin
if (enable_fir == 1'b1)
begin
m_axis_fir_tdata <= acc0 + acc1 + acc2 + acc3 + acc4 + acc5 + acc6 + acc7 + acc8 + acc9 + acc10 + acc11 + acc12 + acc13 + acc14;
end
end
endmodule
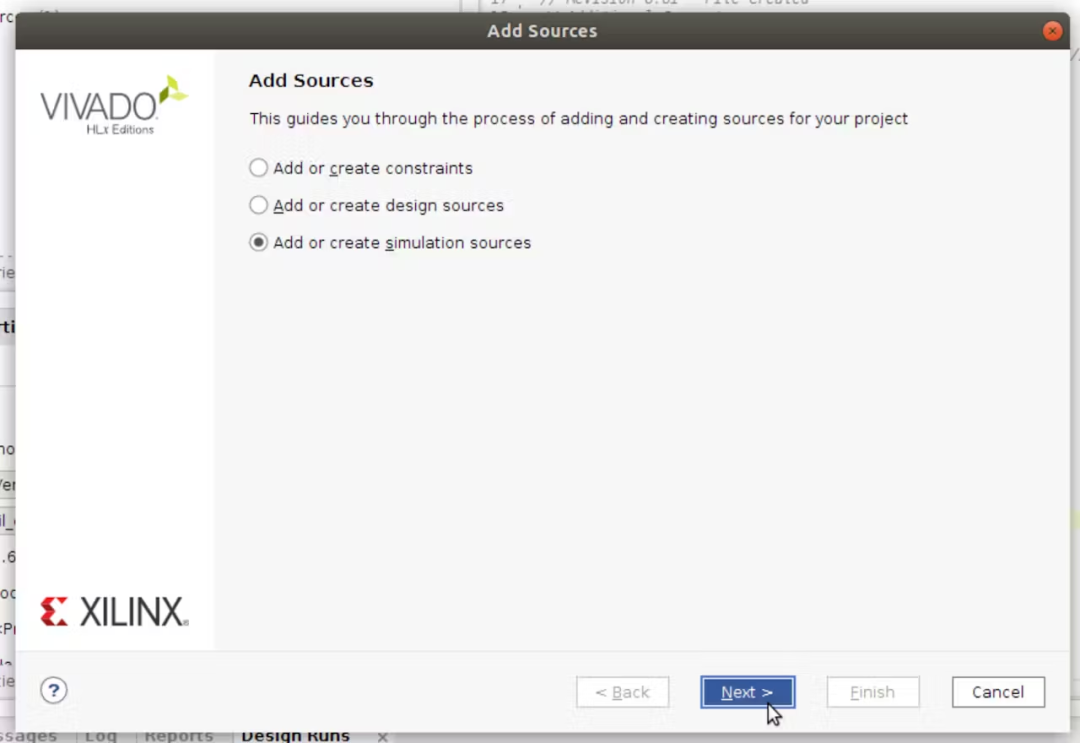
Создание файлов моделирования
Чтобы протестировать модуль FIR, вам необходимо создать тестовый стенд в качестве источника моделирования:
В модуле FIR необходимо протестировать две основные вещи: алгоритм фильтра и интерфейс потока AXI. Для достижения этой цели на испытательном стенде был создан конечный автомат, который генерирует простую синусоидальную волну частотой 200 к Гц и переключает активный сигнал на ведомой стороне и сигнал готовности на ведущей стороне интерфейса FIR.
Тестовая платформа для модуля FIR:
`timescale 1ns / 1ps
module tb_FIR;
reg clk, reset, s_axis_fir_tvalid, m_axis_fir_tready;
reg signed [15:0] s_axis_fir_tdata;
wire m_axis_fir_tvalid;
wire [3:0] m_axis_fir_tkeep;
wire [31:0] m_axis_fir_tdata;
/*
* 100Mhz (10ns) clock
*/
always begin
clk = 1; #5;
clk = 0; #5;
end
always begin
reset = 1; #20;
reset = 0; #50;
reset = 1; #1000000;
end
always begin
s_axis_fir_tvalid = 0; #100;
s_axis_fir_tvalid = 1; #1000;
s_axis_fir_tvalid = 0; #50;
s_axis_fir_tvalid = 1; #998920;
end
always begin
m_axis_fir_tready = 1; #1500;
m_axis_fir_tready = 0; #100;
m_axis_fir_tready = 1; #998400;
end
/* Instantiate FIR module to test. */
FIR FIR_i(
.clk(clk),
.reset(reset),
.s_axis_fir_tdata(s_axis_fir_tdata),
.s_axis_fir_tkeep(s_axis_fir_tkeep),
.s_axis_fir_tlast(s_axis_fir_tlast),
.s_axis_fir_tvalid(s_axis_fir_tvalid),
.m_axis_fir_tready(m_axis_fir_tready),
.m_axis_fir_tvalid(m_axis_fir_tvalid),
.s_axis_fir_tready(s_axis_fir_tready),
.m_axis_fir_tlast(m_axis_fir_tlast),
.m_axis_fir_tkeep(m_axis_fir_tkeep),
.m_axis_fir_tdata(m_axis_fir_tdata));
reg [4:0] state_reg;
reg [3:0] cntr;
parameter wvfm_period = 4'd4;
parameter init = 5'd0;
parameter sendSample0 = 5'd1;
parameter sendSample1 = 5'd2;
parameter sendSample2 = 5'd3;
parameter sendSample3 = 5'd4;
parameter sendSample4 = 5'd5;
parameter sendSample5 = 5'd6;
parameter sendSample6 = 5'd7;
parameter sendSample7 = 5'd8;
/* This state machine generates a 200kHz sinusoid. */
always @ (posedge clk or posedge reset)
begin
if (reset == 1'b0)
begin
cntr <= 4'd0;
s_axis_fir_tdata <= 16'd0;
state_reg <= init;
end
else
begin
case (state_reg)
init : //0
begin
cntr <= 4'd0;
s_axis_fir_tdata <= 16'h0000;
state_reg <= sendSample0;
end
sendSample0 : //1
begin
s_axis_fir_tdata <= 16'h0000;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample1;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample0;
end
end
sendSample1 : //2
begin
s_axis_fir_tdata <= 16'h5A7E;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample2;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample1;
end
end
sendSample2 : //3
begin
s_axis_fir_tdata <= 16'h7FFF;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample3;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample2;
end
end
sendSample3 : //4
begin
s_axis_fir_tdata <= 16'h5A7E;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample4;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample3;
end
end
sendSample4 : //5
begin
s_axis_fir_tdata <= 16'h0000;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample5;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample4;
end
end
sendSample5 : //6
begin
s_axis_fir_tdata <= 16'hA582;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample6;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample5;
end
end
sendSample6 : //6
begin
s_axis_fir_tdata <= 16'h8000;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample7;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample6;
end
end
sendSample7 : //6
begin
s_axis_fir_tdata <= 16'hA582;
if (cntr == wvfm_period)
begin
cntr <= 4'd0;
state_reg <= sendSample0;
end
else
begin
cntr <= cntr + 1;
state_reg <= sendSample7;
end
end
endcase
end
end
endmodule
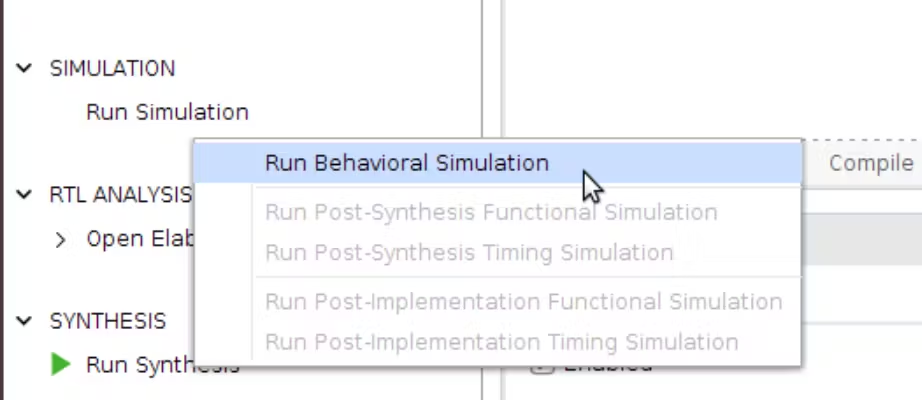
Запустите поведенческую симуляцию
Установив модуль FIR и файлы его тестового стенда, запустите симулятор в Vivado из окна Flow Navigator, выбрав опцию «Запустить поведенческое моделирование».
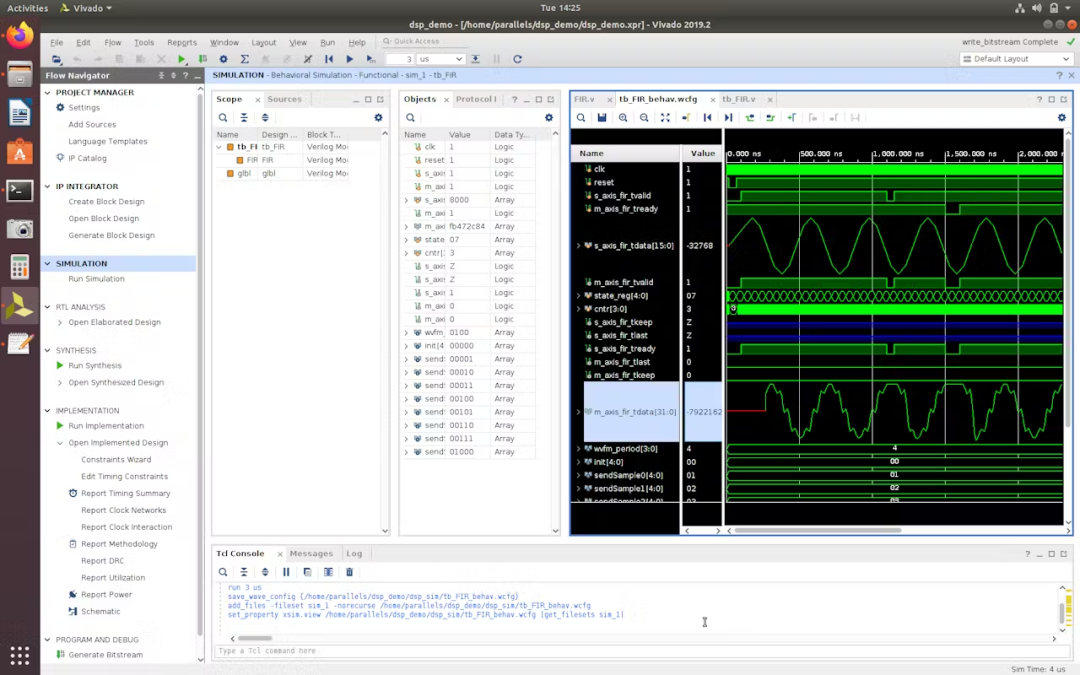
Как показано в поведенческом моделировании, FIR правильно фильтрует сигналы и правильно реагирует на сигналы потока AXI.
Подвести итог
Код приведен выше. Если вам интересно, вы можете запустить его самостоятельно. Однако вы можете заметить, что время работы этого модуля FIR не должно спадать при запуске синтеза и реализации проекта. В следующей статье мы подробно расскажем, как перепроектировать ваш дизайн, если требования по времени не могут быть соблюдены~

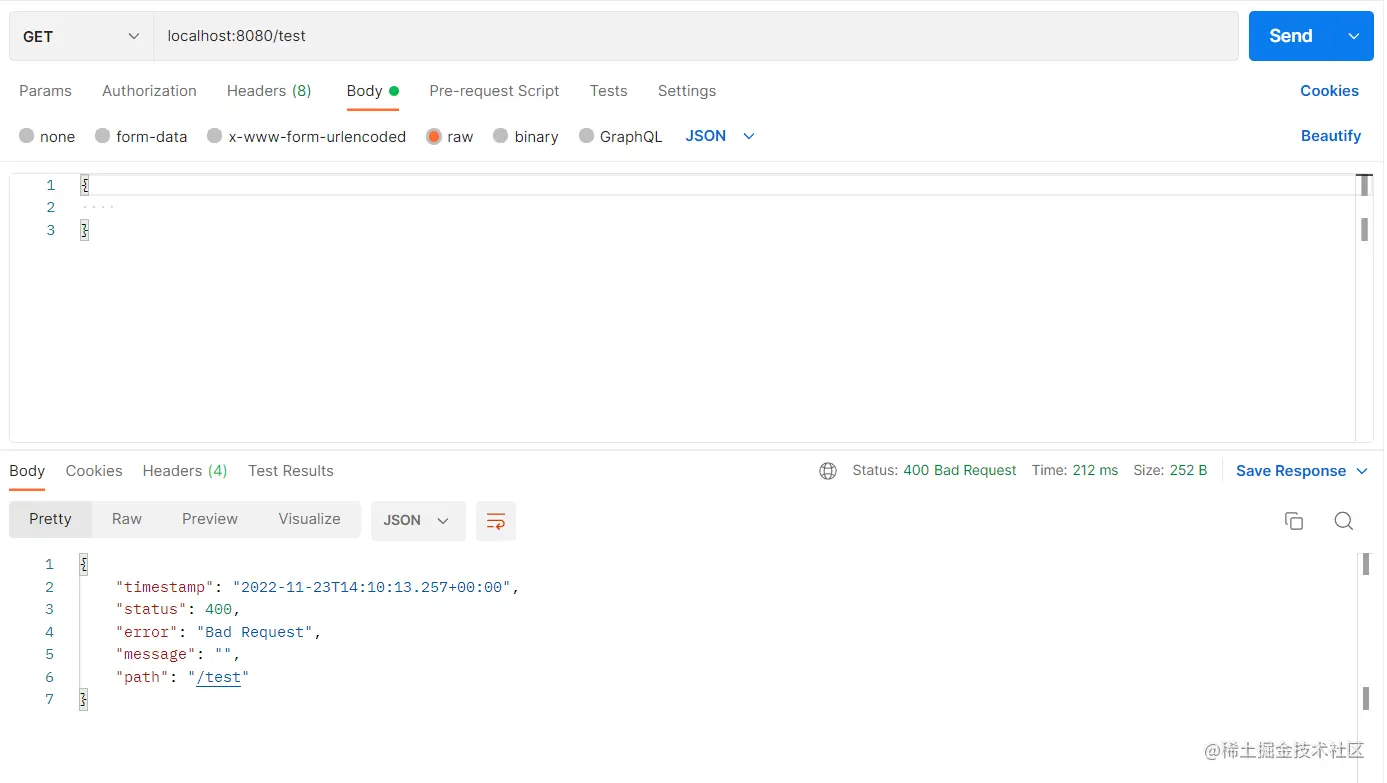
[Спецификация] Результаты и исключения возврата интерфейса SpringBoot обрабатываются единообразно, поэтому инкапсуляция является элегантной.

Интерпретация каталога веб-проекта Flask

Что такое подробное объяснение файла WSDL_wsdl
Как запустить большую модель ИИ локально

Подведение итогов десяти самых популярных веб-фреймворков для Go
5 рекомендуемых проектов CMS с открытым исходным кодом на базе .Net Core
Java использует httpclient для отправки запросов HttpPost (отправка формы, загрузка файлов и передача данных Json)

Руководство по развертыванию Nginx в Linux (Centos)

Интервью с Alibaba по Java: можно ли использовать @Transactional и @Async вместе?

Облачный шлюз Spring реализует примеры балансировки нагрузки и проверки входа в систему.

Используйте Nginx для решения междоменных проблем

Произошла ошибка, когда сервер веб-сайта установил соединение с базой данных. WordPress предложил решение проблемы с установкой соединения с базой данных... [Легко понять]

Новый адрес java-библиотеки_16 топовых Java-проектов с открытым исходным кодом, достойных вашего внимания! Обязательно к просмотру новичкам

Лучшие практики Kubernetes для устранения несоответствий часовых поясов внутри контейнеров
Введение в проект удаления водяных знаков из коротких видео на GitHub Douyin_TikTok_Download_API

Весенние аннотации: подробное объяснение @Service!
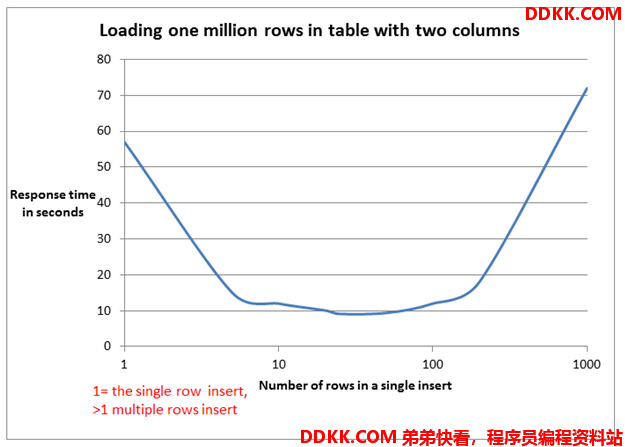
Пожалуйста, не используйте foreach для пакетной вставки в MyBatis. Для 5000 фрагментов данных потребовалось 14 минут. .

Как создать проект Node.js с помощью npm?
Mybatis-plus использует typeHandler для преобразования объединенных строк String в списки списков.

Не удалось установить программное обеспечение Mitsubishi. Возможно, возникла проблема с реестром.

Разрешение ошибок проекта SpringBoot 3 mybatis-plus: org.apache.ibatis.binding.BindingException: неверный оператор привязки
Более краткая проверка параметров. Для проверки параметров используйте SpringBoot Validation.

Поиграйтесь с интеграцией Spring Boot (платформа запланированных задач Quartz)
Несколько популярных режимов интерфейса API: RESTful, GraphQL, gRPC, WebSocket, Webhook.

Redis: практика публикации (pub) и подписки (sub)

Подробное объяснение пакета Golang Context
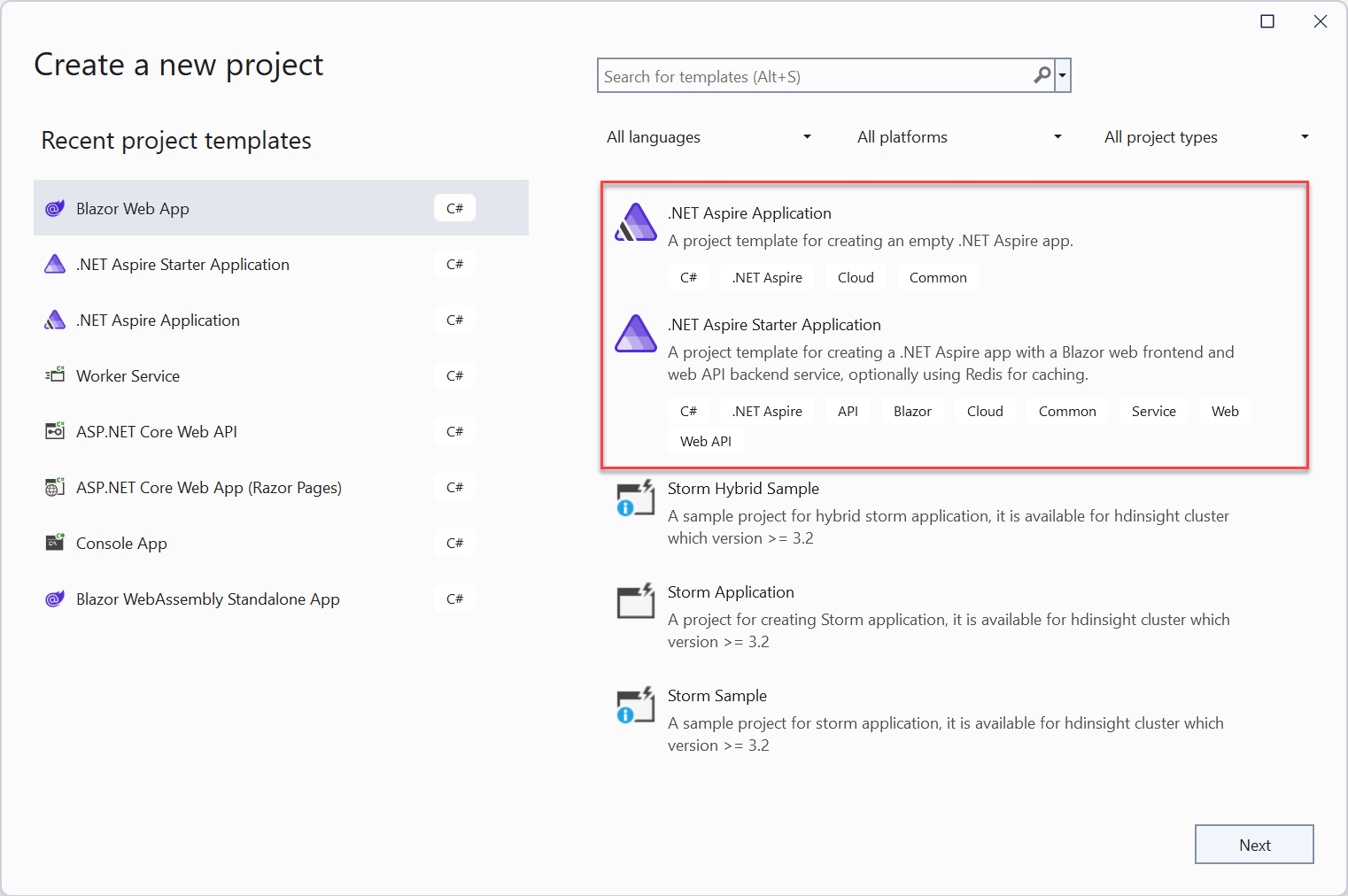
Краткое руководство: создайте свое первое приложение .NET Aspire

Краткое обсуждение метода пакетной вставки MyBatis: обработка 100 000 фрагментов данных занимает всего 2 секунды.

[Инструмент] Используйте nvm для управления переключением версий nodejs, это так здорово!
