Raspberry Pi Pi4B + построение среды картографирования лидара SLAM (Ubuntu20.04.3 + ROS Noetic)
оригинал:Raspberry Pi Pi4B + построение среды картографирования лидара SLAM (Ubuntu20.04.3 + ROS Noetic)
Когда я раньше изучал ros, система ubuntu18.04, установленная на плате nvidia jetson nano, была относительно нормальной, но система Raspberry, установленная на плате pi4b, имела различные проблемы с зависимостями. Недавно я хочу в полной мере использовать следующие несколько плат pi4b, и я неоднократно пробовал официальную/неофициальную версию ubuntu18.04.5+ROS Melodic pi4, но в конце концов я застрял на таких зависимостях, как картографический сервер или рвиз. Наконец, тест установки прошел успешно с использованием Pi4B + Ubuntu20.04.3 + ROS Noetic + RpLidar. Запишите процесс установки.

01 Запись образа Ubuntu
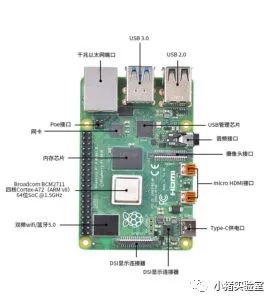
Подготовьте плату PI4B, SD-карту, устройство чтения карт USB, монитор, неограниченную клавиатуру и мышь, а также компьютер для записи. Здесь я использую ноутбук для разработки Ubuntu.
1.1 Подготовьте программное обеспечение к записи
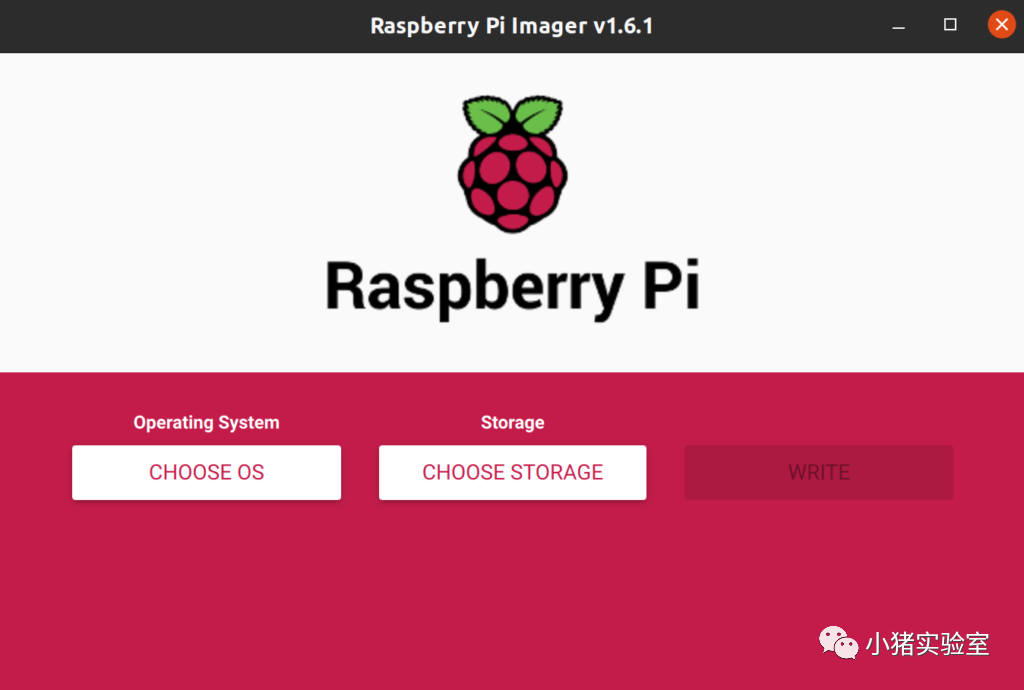
а. Установите Raspberry Pi Imager.
Установите официальное программное обеспечение для записи Raspberry Pi Raspberry Pi Imager. Я использую сам Linux. Вы можете установить его напрямую с помощью следующей команды:
sudo snap install rpi-imagerДругие операционные системы могут сами скачать соответствующие версии:
- Raspberry Pi Imager as a deb package
- Raspberry Pi Imager for Windows
- Raspberry Pi Imager for macOS
После установки приложения это будет значок Raspberry Pi. Найдя его, запустите:
1.2 Запись образа
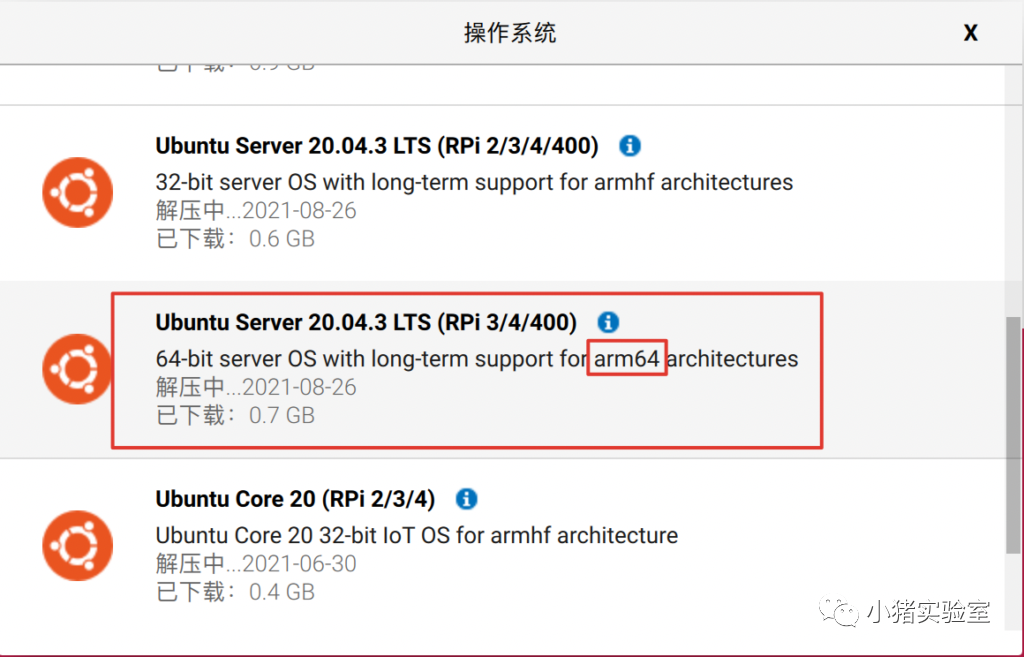
а. Выберите изображение
Нажмите «ВЫБРАТЬ ОС», выберите «Другая ОС общего назначения» — «Ubuntu» — «Ubuntu Server 20.04.3», выберите версию Arm64 (соответствующий файл образа будет загружен автоматически, отдельно его скачивать не нужно) :
б. Выберите SD-карту.
Нажмите «ВЫБРАТЬ STOGAGE», выберите SD-карту для записи и нажмите «ЗАПИСАТЬ».
*Примечание: Скорость загрузки и стрельбы здесь очень медленная. По ощущениям это занимает минимум 1-2 часа. Я уже не выдержал и уснул на следующее утро и увидел, что стрельба завершена. ..
1.3 Инициализация системы
а. Пароль инициализации
Вставьте SD-карту в pi4, подключите клавиатуру, мышь и монитор и запустите систему. Исходное имя пользователя и пароль — Ubuntu. Пароль будет принудительно изменен при первом входе в систему.
Вы также можете создать собственного пользователя:
# Добавить рабочего пользователя
sudo adduser work
# Добавить разрешения
sudo vim /etc/sudoers
work ALL=(ALL) ALL
sudo usermod -aG sudo,adm,dialout,cdrom,floppy,audio,dip,video,plugdev,lxd,netdev work
# Просмотр разрешений
id work
# Сменить пользователя
su workПоскольку установлена серверная версия, для облегчения работы нам также необходимо установить десктоп:
# возобновлять
sudo apt update
sudo apt upgrade
# Установить рабочий стол
sudo apt install -y ubuntu-desktop1.4 Удаленное управление
а. Удаленный рабочий стол
После настройки вики в настройках скачайте и установите версию nomachine Arm64 с официального сайта. После этого можно отключиться от монитора, клавиатуры и мыши, проверить IP через роутер и напрямую работать по ssh или nomachine.
б. Удаленная сеть.
Вы также можете установить ZeroTier, войти в систему и создать частную сеть. После присоединения к плате вы можете напрямую подключиться к плате в сети, отличной от локальной сети:
# Установка Linux следующим щелчком мыши
curl -s https://install.zerotier.com | sudo bash
# Присоединяйтесь к созданной вами частной сети
zerotier-cli join a09acf02339e3f97Настройте «сетевой» автоматический сетевой прокси-сервер и настройте адрес файла .pac, чтобы в дальнейшем вы не смогли загрузить определенные пакеты.
02 Установить РОС Noetic
2.1 Установка ros noetic
Поскольку melodic поддерживает только 18.04, а ubuntu20.04 в ROS1 поддерживает только noetic, поэтому мы устанавливаем noetic версию здесь:
# Настройка источника ros
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# Добавить открытый ключ
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# или curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
# Установить рос Десктопная версия
sudo apt update
sudo apt install ros-noetic-desktop #Desktop полная версия-desktop-full Версия для настольных компьютеров-рабочий стол Базовая версия-ros-base;
# Установить пакет Slam
sudo apt install ros-noetic-slam-gmapping ros-noetic-map-server
# Настройте среду
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
# Установите зависимости компиляции
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
# инициализация rosdep
sudo apt install python3-rosdep
sudo vim /etc/hosts
185.199.110.133 raw.githubusercontent.com
sudo rosdep init
rosdep update2.2 Установите среду компиляции и протестируйте лидар
# Подготовьте каталог компиляции
mkdir -p ~/catkin_ws/src
cd catkin_ws/src/
# Клон РПЛИДАР Библиотека ROSкод (не забудьте добавить ssh платы ключ к гитхабу)
git clone git@github.com:robopeak/rplidar_ros.git
# компилировать
cd ~/catkin_ws
catkin_make
# source
echo "source /home/ubuntu/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
echo $ROS_PACKAGE_PATH
# Запустить узел лидара
roscore
rosrun rplidar_ros rplidarNode
# Просмотр данных лидара
rostopic list
rostopic echo /scan
# Визуализация данных облака точек
roslaunch rplidar_ros view_rplidar.launch
# Если вы просматриваете облака точек на ПК, необходимо отключить запуск rplidarNode.
roscd rplidar_ros/launch/
cp view_rplidar.launch view_rplidar_robot.launch # Изменить файл робота,Закомментируйте rplidar.launch,Чтобы запретить ПК запускать узел rplidar локально2.3 Тестовое картографирование ударов
Ссылка: Операционная система робота ROS — использование лидара RpLidar A1 для позиционирования и картографирования SLAM № 4. Использование лидара для позиционирования и картографирования SLAM.
# Инструменты позиционирования и управления картой
sudo apt install ros-noetic-fake-localization ros-noetic-map-server
# hector Никаких данных одометра не требуется, карты можно строить только на основе лазерной информации.
sudo apt install ros-noetic-hector-slam ros-noetic-hector-slam-launch
# gmapping Для построения карты требуется информация IMU+одометр+лазер.
sudo apt install ros-noetic-gmapping ros-noetic-slam-gmapping
# karto
sudo apt install ros-noetic-open-karto ros-noetic-slam-karto
# Тест на отображение SLAM
roslaunch rplidar_ros view_slam.launch
# Визуализация на ПК
roslaunch rplidar_ros view_slam_robot.launch #Оставить только rviz узел может
# сохранить карту
roscd rplidar_ros/
mkdir map -p && cd map
rosrun map_server map_saver -f map03 Подвести итог
В процессе установки точка доступа 4G для мобильного телефона была подключена на протяжении всего процесса, за исключением raw.githbusercontent.com. Установка прошла относительно гладко, поэтому, если у вас возникли различные проблемы с сетью, обратите внимание на три решения:
1. Используйте Интернет с научной точки зрения, чтобы избежать недоступных доменных имен;
2. Точки доступа мобильных телефонов 4/5G имеют более высокую скорость сети (весь трафик 2-3G снижается);
3. Если доменное имя не удается найти, что бы вы ни делали, проверьте IP-адрес с другого компьютера и настройте IP-адрес непосредственно в /etc/hosts, пропуская процесс DNS.



Углубленный анализ переполнения памяти CUDA: OutOfMemoryError: CUDA не хватает памяти. Попыталась выделить 3,21 Ги Б (GPU 0; всего 8,00 Ги Б).

[Решено] ошибка установки conda. Среда решения: не удалось выполнить первоначальное зависание. Повторная попытка с помощью файла (графическое руководство).

Прочитайте нейросетевую модель Трансформера в одной статье

.ART Теплые зимние предложения уже открыты

Сравнительная таблица описания кодов ошибок Amap

Уведомление о последних правилах Points Mall в декабре 2022 года.

Даже новички могут быстро приступить к работе с легким сервером приложений.

Взгляд на RSAC 2024|Защита конфиденциальности в эпоху больших моделей

Вы используете ИИ каждый день и до сих пор не знаете, как ИИ дает обратную связь? Одна статья для понимания реализации в коде Python общих функций потерь генеративных моделей + анализ принципов расчета.

Используйте (внутренний) почтовый ящик для образовательных учреждений, чтобы использовать Microsoft Family Bucket (1T дискового пространства на одном диске и версию Office 365 для образовательных учреждений)

Руководство по началу работы с оперативным проектом (7) Практическое сочетание оперативного письма — оперативного письма на основе интеллектуальной системы вопросов и ответов службы поддержки клиентов

[docker] Версия сервера «Чтение 3» — создайте свою собственную программу чтения веб-текста

Обзор Cloud-init и этапы создания в рамках PVE

Корпоративные пользователи используют пакет регистрационных ресурсов для регистрации ICP для веб-сайта и активации оплаты WeChat H5 (с кодом платежного узла версии API V3)

Подробное объяснение таких показателей производительности с высоким уровнем параллелизма, как QPS, TPS, RT и пропускная способность.

Удачи в конкурсе Python Essay Challenge, станьте первым, кто испытает новую функцию сообщества [Запускать блоки кода онлайн] и выиграйте множество изысканных подарков!

[Техническая посадка травы] Кровавая рвота и отделка позволяют вам необычным образом ощипывать гусиные перья! Не распространяйте информацию! ! !

[Официальное ограниченное по времени мероприятие] Сейчас ноябрь, напишите и получите приз

Прочтите это в одной статье: Учебник для няни по созданию сервера Huanshou Parlu на базе CVM-сервера.

Cloud Native | Что такое CRD (настраиваемые определения ресурсов) в K8s?

Как использовать Cloudflare CDN для настройки узла (CF самостоятельно выбирает IP) Гонконг, Китай/Азия узел/сводка и рекомендации внутреннего высокоскоростного IP-сегмента

Дополнительные правила вознаграждения амбассадоров акции в марте 2023 г.

Можно ли открыть частный сервер Phantom Beast Palu одним щелчком мыши? Супер простой урок для начинающих! (Прилагается метод обновления сервера)

[Играйте с Phantom Beast Palu] Обновите игровой сервер Phantom Beast Pallu одним щелчком мыши

Maotouhu делится: последний доступный внутри страны адрес склада исходного образа Docker 2024 года (обновлено 1 декабря)

Кодирование Base64 в MultipartFile

5 точек расширения SpringBoot, супер практично!

Глубокое понимание сопоставления индексов Elasticsearch.

15 рекомендуемых платформ разработки с нулевым кодом корпоративного уровня. Всегда найдется та, которая вам понравится.
