Принципы и применение дальнометрии бинокулярного зрения.
Принципы и применение дальнометрии бинокулярного зрения.
Автор: Технология Линци
1 Принцип дальности бинокулярного зрения
Принцип определения дальности бинокулярного зрения можно разделить на аналогичный принцип треугольника и принцип пиксельной шкалы. Первое является общепринятым объяснением, а второе — принципом, названным Lingqi Technology. Подробности заключаются в следующем.
1.1 Принцип подобных треугольников
В настоящее время на Принципе ранжирования бинокулярного Объяснение вопроса – принцип подобия треугольника.,следующее Рисунок 1(Ссылка на источник изображенияhttps://cloud.tencent.com/developer/article/2054308),OrиOtДве камеры, расположенные параллельно,B — расстояние между оптическими осями двух камер.,f — фокусное расстояние линзы,Точка P — это физическая точка сцены.,Z — расстояние от физической точки P до камеры.
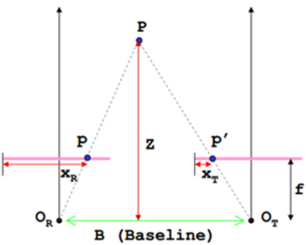
По принципу подобных треугольников можно получить уравнение 1, а затем вывести выражение Z, как показано в уравнении 2.


1.2 Принцип пиксельного масштаба
Как показано на рисунке 2 ниже, камера находится в позиции 1, ее поле зрения — β, расстояние от земли — Z, ширина захватываемой земли — L, пиксели изображения — Ш*В, есть точка. P в сцене и x точки P, когда камера находится в положении 1. Координата пикселя по оси — X1.
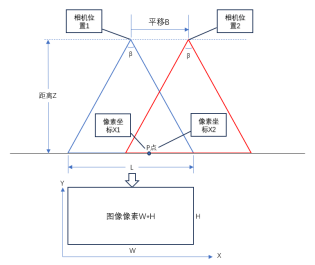
Мы можем легко получить выражение для расстояния Z, как показано в уравнении 3. β связано с линзой и является известным термином. Z можно найти, если известно L, и L содержит W пикселей. Нам нужно только это выяснить. можно найти значение, представленное расстоянием каждого пикселя, Z.

Теперь переместите камеру на расстояние B слева направо в позицию 2. В этот момент пиксельная координата точки P по оси X на изображении равна X2. Таким образом, мы можем найти расстояние t, представленное каждым пикселем, см. Уравнение 4,

Итак, L=Wt, тогда можно получить Z, см. уравнение 5.
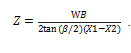
Если мы непосредственно разместим камеру с теми же параметрами, что и камера 1, в позиции 2, мы сможем использовать бинокулярную камеру для измерения расстояния.
2 продукта собственной разработки, основанные на принципе масштабирования пикселей.
При использовании принципа пиксельной шкалы для измерения расстояний наиболее важно указать эталонное расстояние, чтобы найти расстояние, представленное каждым пикселем. В бинокулярном зрении базовая длина двух камер используется как опорное расстояние. В монокулярном зрении, если в сцене также можно найти известное опорное расстояние, можно также найти и окончательное расстояние.
В настоящее время большинство продуктов бинокулярного зрения решают карты глубины для картографирования и навигации. Такие алгоритмы, как стереосопоставление и трехмерная реконструкция, требуют высокой вычислительной мощности и неприменимы в некоторых сценариях, требующих только простого определения местоположения, таких как определение высоты дрона. Подвеска с фиксированной точкой. В настоящее время на рынке обычно используются методы лазерной локации, ультразвуковой локации и т. д. Компания Wuhan Lingqi Technology Co., Ltd. разработала интегрированный модуль локации оптического потока LQ-S01, используя принцип пиксельной шкалы бинокулярного зрения. , такой как рисунок 3,
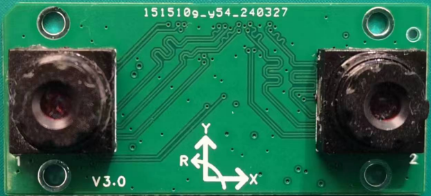
Этот модуль имеет функции измерения дальности и оптического потока, что позволяет дрону легко достигать фиксированной высоты и подвески в фиксированной точке. В ответ на сложную проблему калибровки бинокулярной камеры компания Lingqi Technology разработала соответствующие алгоритмы, позволяющие легко выполнить калибровку камеры. Эта технология ожидает заявки на патент. Кроме того, Lingqi Technology также разработала собственный алгоритм оптического потока для прямого вывода физических значений. Данные стабильны и надежны. Без какой-либо фильтрации дрон может стабильно левитировать. Видео полета можно просмотреть, выполнив поиск по запросу Lingqi Technology на станции. Б. . Этот продукт был запущен на Taobao. Заинтересованные студенты могут обсудить его вместе. Что касается использования модулей оптического потока, вы можете прочитать другую статью «Применение модулей оптического потока в БПЛА».



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
