Принцип и применение ПИД-регулирования (1)
Принцип и применение ПИД-регулирования (1)
Автор: Технология Линци
1 Основная концепция ПИД
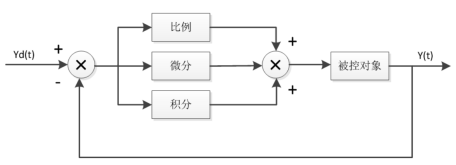
Принципиальная схема ПИД-управления показана на рисунке 1 ниже. Система ПИД-управления включает в себя три модуля: пропорциональное управление P, интегральное управление I и дифференциальное управление D. P пропорциональное управление: основная функция заключается в линейном увеличении объекта управления. При постоянном соотношении динамический выходной сигнал заключается в том, что это приводит к установившейся ошибке. I интегральное управление: основная функция заключается в том, чтобы устранить установившуюся ошибку. Недостаток заключается в том, что это увеличит перерегулирование D дифференциальное управление: основная функция - ослабить перерегулирование и увеличить скорость инерционного реагирования. P, I и D выбирают различные комбинации в соответствии с фактическими объектами управления, такими как ПИ-управление, ПД-управление и ПИД-управление. (Ссылка для справки: https://blog.csdn.net/weixin_48435215/article/details/125261840)
2 Глубокое понимание PID
2.1 Применение ПИД в системах первого порядка
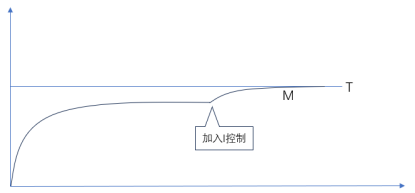
Если вы хотите контролировать скорость двигателя, это целевое значение T. Двигатель также имеет тахометр для измерения скорости двигателя M в реальном времени и систему электропитания для подачи питания на двигатель. является идеальной моделью и не учитывает отставание, то есть зависимость скорости и мощности линейная, сопротивления воздуха нет. Теперь используйте ПИД-алгоритм для управления. Сначала добавляется только пропорциональное управление. Выходное выражение П-регулятора представляет собой уравнение 1.
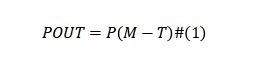
В реальной системе POUT представляет собой электрический сигнал, который линейно связан с выходной мощностью системы электропитания. Предположим, что входная мощность двигателя в этот момент равна Вт плюс выходная мощность пропорционального контроллера, общая мощность. Это (W+POUT). Это видно из этого. Когда (M-T) равно 0, выход пропорционального контроллера равен 0, система достигает стабильного состояния, скорость двигателя равна T, и задача управления завершена.
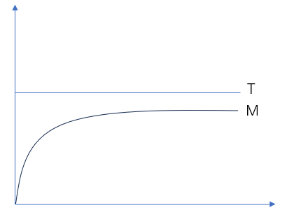
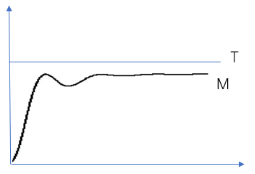
Но после добавления сопротивления воздуха в это время скорость двигателя уменьшится. В это время контроллер P увеличит выходную мощность. Часть этого выходного сигнала используется для увеличения скорости двигателя, а часть — для компенсации сопротивления ветра. Скорость двигателя будет продолжать приближаться к T, но в это время выходной сигнал P-контроллера будет продолжать уменьшаться, но когда M достигнет определенного значения, выходной сигнал P-контроллера можно будет использовать только для компенсации сопротивления ветра. В это время M достигает стабильности, но всегда меньше T, как показано на рисунке 2. В это время задача управления светом не может быть выполнена с помощью P-управления.
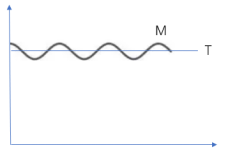
Поэтому рассмотрим добавление интегрального управления I. Интегральное управление постоянно накапливает ошибки. Выходное выражение интегрального контроллера показано в уравнении 2. Таким образом, у M есть мотивация продолжать приближаться к T.
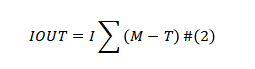
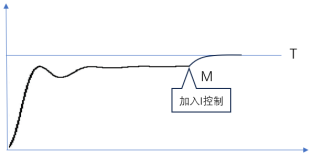
По мере того, как i-контроллер продолжает накапливать, M будет постепенно приближаться к T, пока не станет равным T, как показано на рисунке 3. В это время выходной сигнал i-контроллера фиксируется и задача управления завершается.
В системе этого типа сигнал, представленный выходом ПИД-регулятора, имеет линейную зависимость от контролируемой величины, такой как указанный выше электрический сигнал и скорость двигателя. Этот тип системы называется системой первого порядка. контролироваться только PI для достижения целей контроля.
2.2 Применение ПИД в системах второго порядка
Основываясь на характеристиках линейной зависимости приведенной выше системы первого порядка, мы можем продолжить изучение того, каким будет весь процесс управления, если сигнал, представленный на выходе ПИД-регулятора, не связан линейно с управляемой величиной, а связан с время.
Здесь в качестве примера мы возьмем управление ориентацией БПЛА, как показано на рисунке 4. Предполагается, что в это время БПЛА имеет угол наклона.
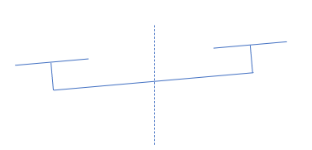
Теперь нам нужно перевести БПЛА в горизонтальное положение. Целевой угол ориентации здесь — T, а угол ориентации БПЛА в реальном времени — M. Сначала нам нужно добавить контроллер P. На данный момент это левый двигатель. ускоряется, а правый двигатель замедляется. БПЛА вращается по часовой стрелке. По мере накопления углового ускорения вращения угловая скорость БПЛА становится все больше и больше, а угол ориентации БПЛА будет продолжать уменьшаться. Согласно уравнению 1, выходной сигнал контроллера P будет продолжать уменьшаться, то есть Угловое ускорение БПЛА также будет продолжать уменьшаться при положении БПЛА. Когда угол ориентации равен 0, дрон находится в горизонтальном положении. Однако, поскольку до этого он ускорялся, угловая скорость дрона в этот момент не равна 0 и достигает максимального значения. Дрон будет продолжать вращаться по часовой стрелке, а затем туда. будет отрицательным. Угловое ускорение. Явление, описанное в методе настройки, является постоянным.
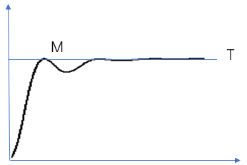
В это время добавляется контроллер D. Функция контроллера D заключается в подавлении изменений. Когда угол наклона дрона постепенно приближается к 0, контроллер D выдает отрицательное качество управления в реальном времени, пропорциональное угловой скорости (то же самое). как выход регулятора П). Напротив), чем больше угловая скорость, тем больше будет отрицательное качество управления. Отсюда можно узнать, что угловая скорость БПЛА при угле наклона близка к 0. определенно меньше, чем без добавления контроллера D. Фактически, если параметры умеренные, БПЛА быстро сходится, как показано на рисунке 6, а затем достигнет горизонтального состояния, то есть задача управления завершена.
Ранее предполагалось, что БПЛА представляет собой идеальную модель с однородной массой. В практических приложениях невозможно иметь однородную массу. Если предположить, что центр тяжести БПЛА находится не в центре, а справа, то Рисунок 6. вышеизложенное не будет верным, и окончательный установившийся угол наклона не может достичь целевого значения T. , но больше или меньше T, как показано на рисунке 7 (меньше T), что аналогично ситуации после добавления сопротивление воздуха в разделе 2.1
На данный момент нам нужно добавить I-контроллер, который будет накапливать ошибки, и его направление вывода такое же, как у P-контроллера, как показано на рисунке 8.
Вышеупомянутая система здесь называется системой второго порядка. Ее характеристика заключается в том, что выходной сигнал ПИД-регулятора будет накапливаться в два раза, а затем изменять контролируемую величину. Например, в приведенной выше системе сначала выходной сигнал ПИД-регулятора будет изменять значение. подъем четырех двигателей, и БПЛА начинает набирать угловое ускорение, накопленное с течением времени, меняющее угловую скорость, а затем меняющее угол. В систему этого типа необходимо одновременно добавить элементы управления P, I и D, чтобы удовлетворить требованиям управления.
В практических приложениях настройка параметров ПИД является очень утомительной и сложной задачей, и для достижения лучшего эффекта управления иногда добавляют многоуровневый ПИД. Lingqi Technology пытается найти некоторые теоретические правила и стремится снизить сложность настройки PID. Последующие исследования будут постоянно обновляться и публиковаться.
(~~Продолжение следует. Глава 3: Математическое выражение ПИД-регулятора в процессе управления ориентацией БПЛА~~)



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
