Постобработка данных многолучевого эхолота
В соответствии с принципом многолучевого измерения многолучевой датчик каждый раз излучает акустическую волну и может возвращать сотни точечных данных на линии.
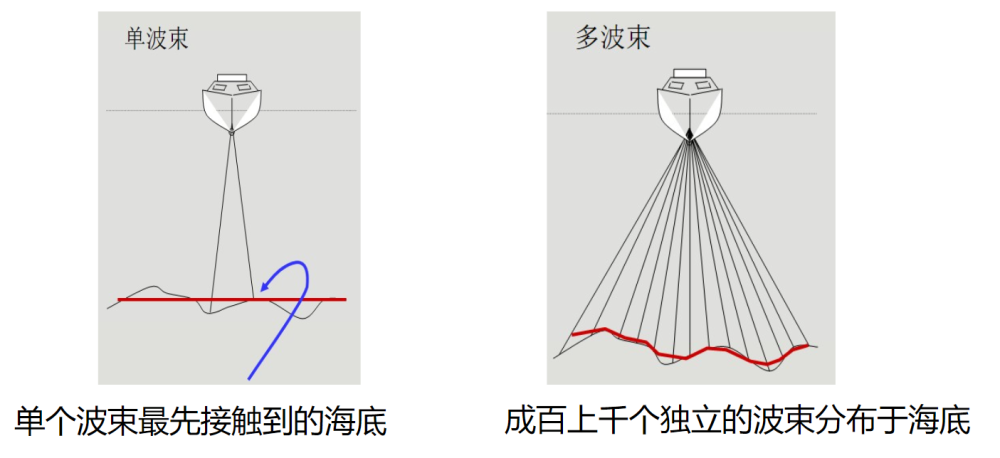
Однако из-за влияния множества факторов, таких как GNSS, среда измерения корпуса и скорость звука, данные облака точек, собранные многолучевым гидроакустическим измерительным оборудованием, будут иметь различную степень шума.
Так называемая постобработка многолучевых данных — это процесс использования инерциальной навигации, уровня прилива и других данных, настроенных во время измерения, для коррекции и решения исходных многолучевых данных, а затем удаления шума.
Предварительная обработка данных
Импорт данных
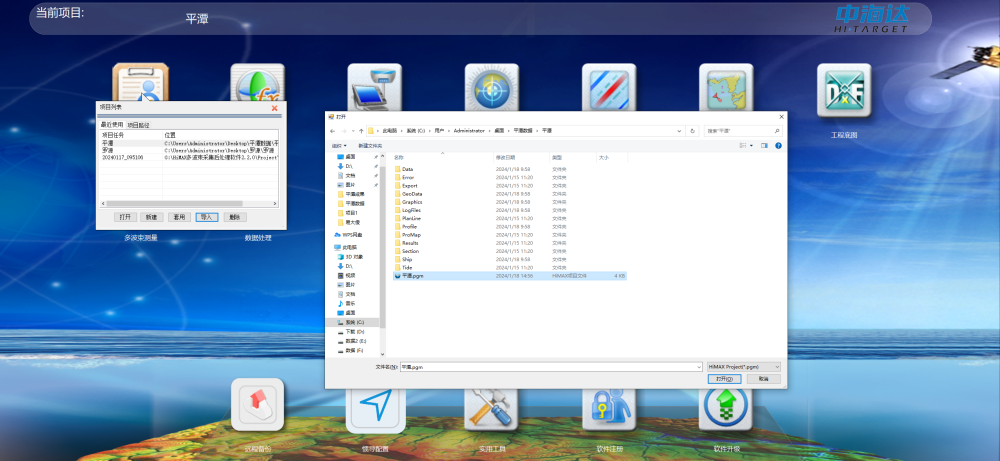
Вставьте программную собаку, откройте [Настройки проекта], нажмите [Импортировать], импортируйте проект и откройте его.
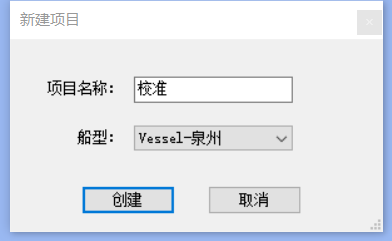
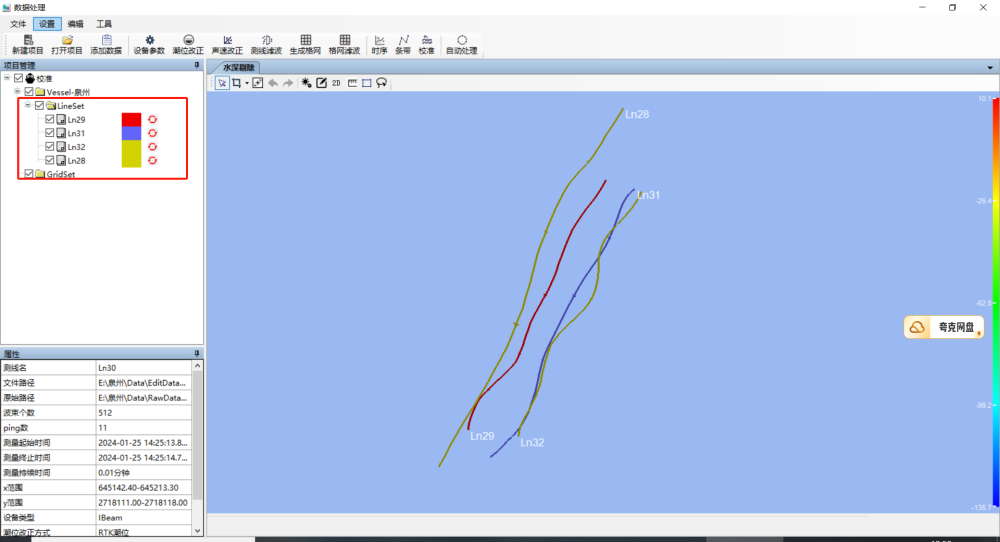
Нажмите [Обработка данных], [Новый проект], а затем добавьте данные линии съемки.
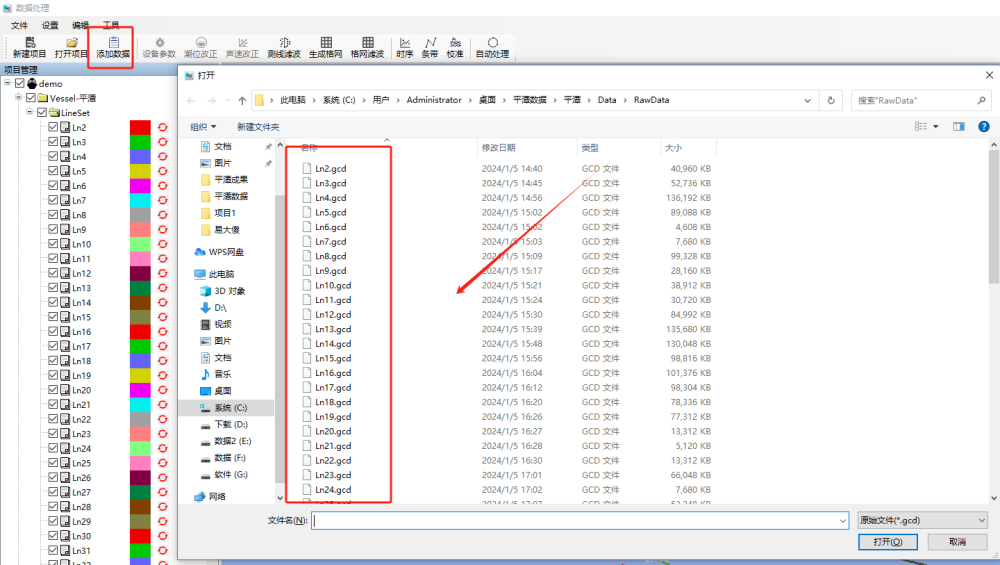
В соответствии с траекторией маршрута, отображаемой в интерфейсе программного обеспечения, при необходимости можно исключить боковые линии с большими поворотами.
Коррекция данных
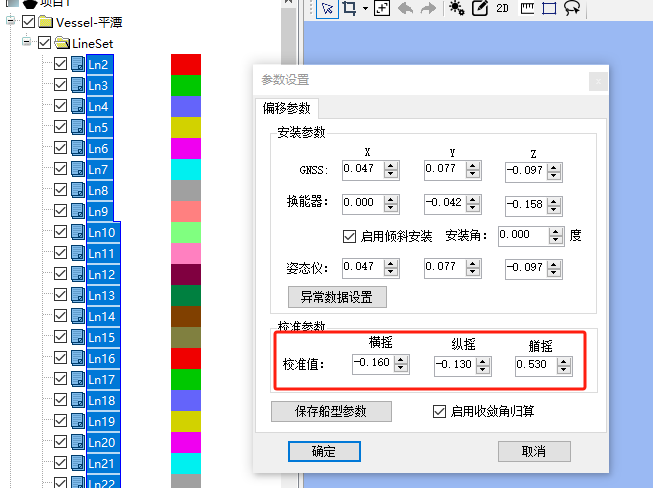
После импорта данных используйте мышь, чтобы выбрать все текущие линии измерений и изменить соответствующие параметры измеренных данных для интеграции данных инерциальной навигации, данных о скорости звука и данных об уровне прилива.
Введите [Калибровочное значение инерциальной навигации]
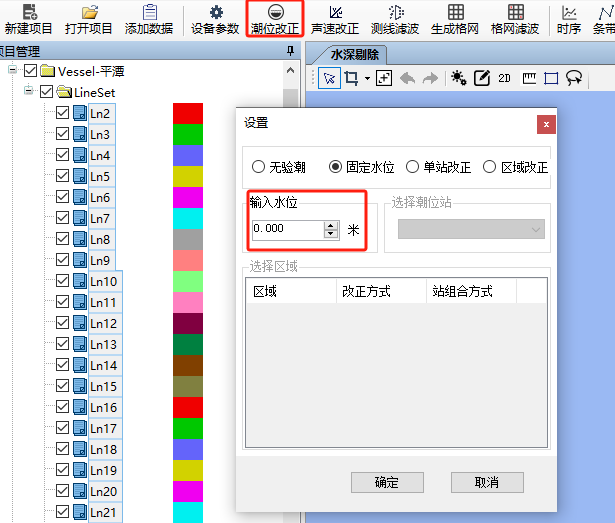
входитьПересмотр уровня прилива,Если региональные уровни приливов не сильно различаются, средний уровень воды за измеренный период обычно выбирается в качестве фиксированного уровня воды для корректировки.
Поправку на скорость звука можно внести с помощью данных профилировщика скорости звука. По умолчанию для коррекции используется скорость звука на поверхности.
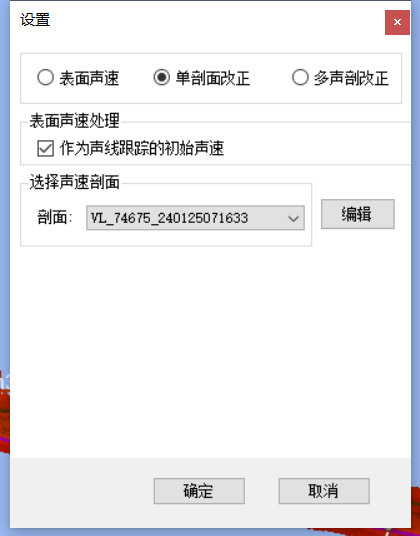
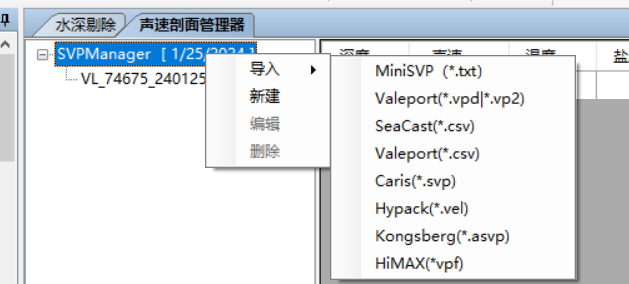
Импортируйте данные профилировщика скорости звука, [Инструменты]-[Редактировать скорость звука]
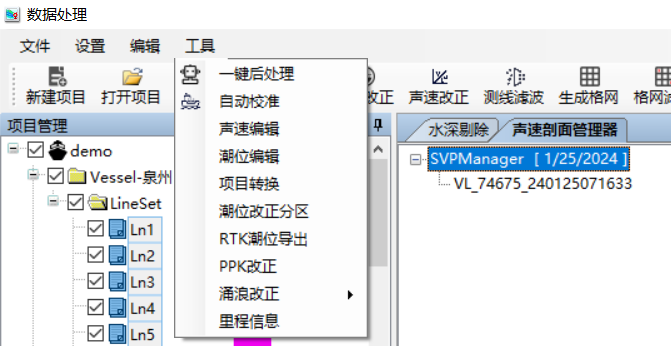
Данные акустического профиля в различных форматах можно импортировать напрямую.
автоматическая фильтрация
Коррекция После завершения ввода параметра данных можно использовать фильтрацию для удаления данных шума. Выберите условия фильтра в соответствии с данными. Угол раскрытия — это угол раскрытия при многолучевом измерении данных. Обычно рекомендуется составлять 130° (65, -65). дыры в данных.
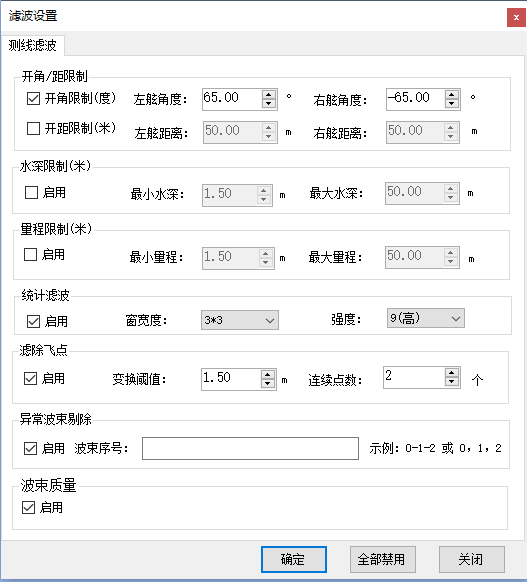
После ввода всех параметров нажмите «Автообработка».

Просмотр данных датчика
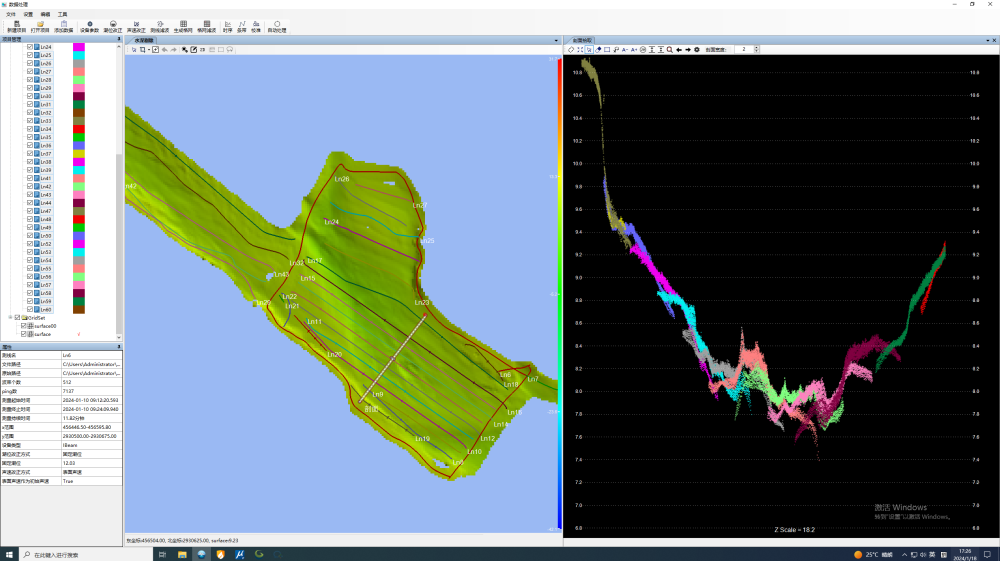
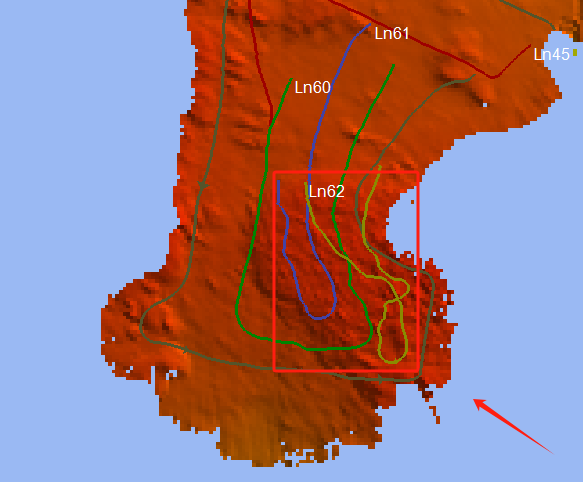
На этом этапе необходимо проверить данные датчиков каждой измерительной линии по одному, чтобы увидеть, есть ли какие-либо аномальные данные. Как показано на рисунке ниже, мы можем проверить уровень прилива, скорость звука, положение, курс и трек. данные строки.
Аномальные сигналы или сигналы низкого качества можно удалить вручную.
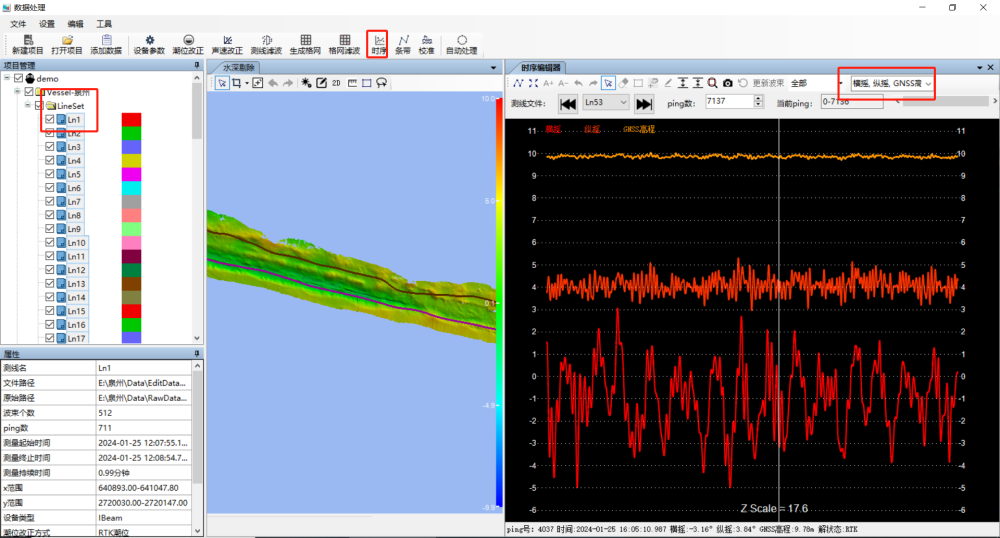
Выберите все линии измерения, а затем нажмите [Временные ряды], чтобы просмотреть данные различных датчиков линий измерения, проверить наличие аномальных данных и выбрать один источник данных датчика, чтобы исключить аномальные данные.
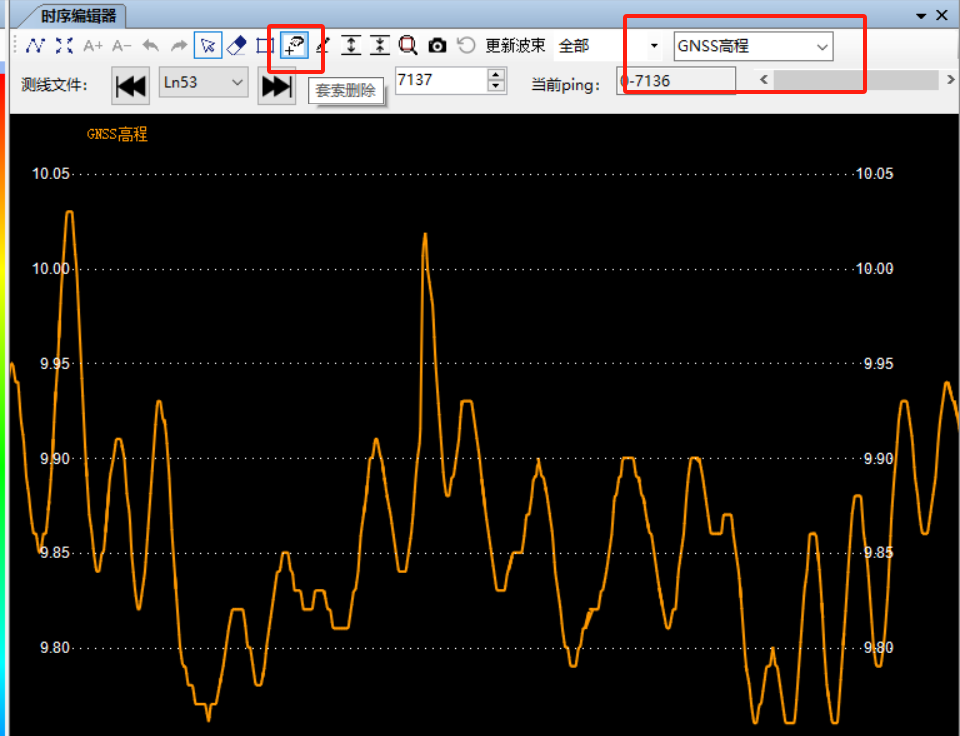
В основном для проверки статуса решения GNSS и устранения нефиксированных данных решения.
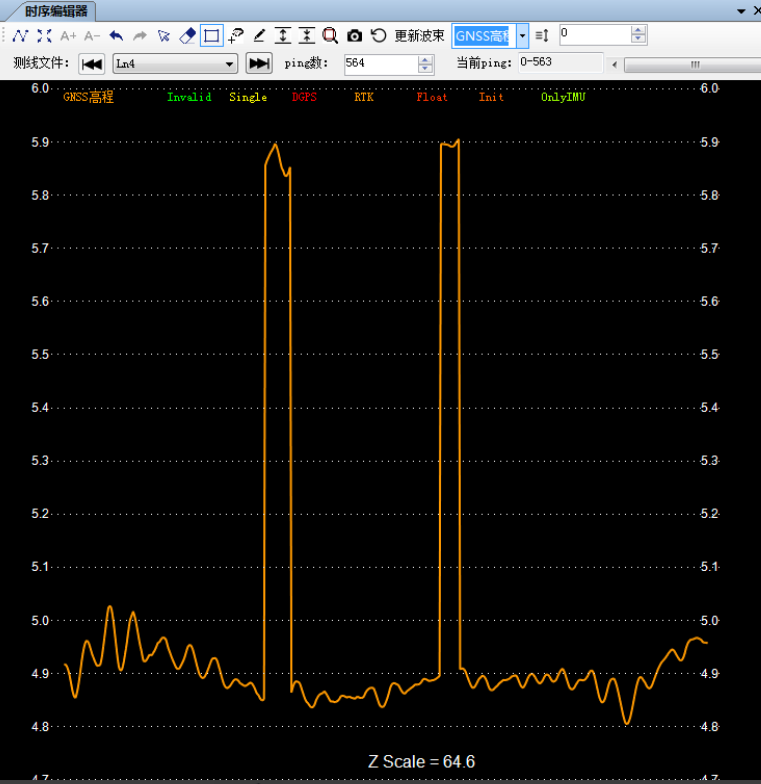
RTK: фиксированное решение
Float: решение с плавающей запятой
Неверно: неверное решение.
Single: одноточечное решение
DGPS: дифференциальный анализ
OnlyIMU: чистая инерциальная навигация
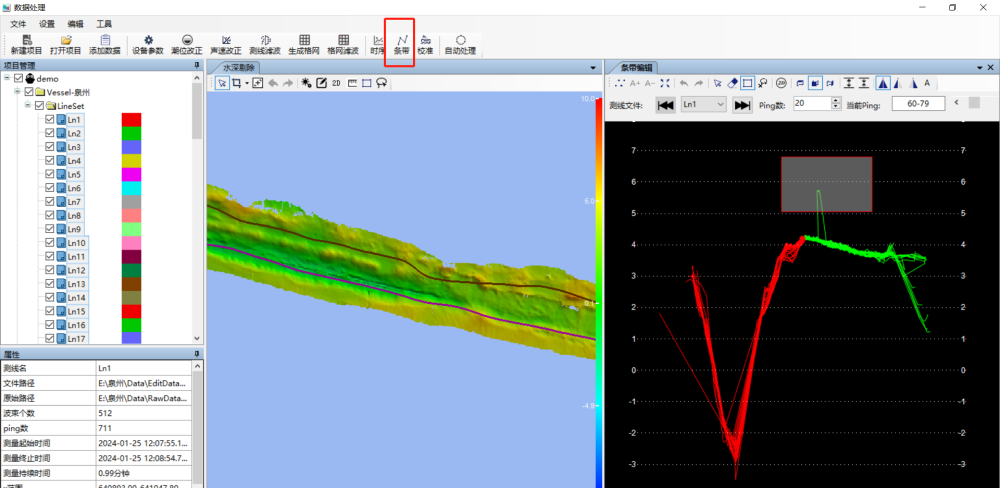
Редактирование полосы
Этот этап в основном основан на редактировании. Данные о глубине воды редактируются в виде полос и редактируются по принципу непрерывности местности.
Как показано на рисунке ниже, мы выбираем данные шума, которые хотим удалить, с помощью выбора кадра или других режимов выбора, и нажимаем соответствующую кнопку функции удаления на панели инструментов, чтобы удалить шум.
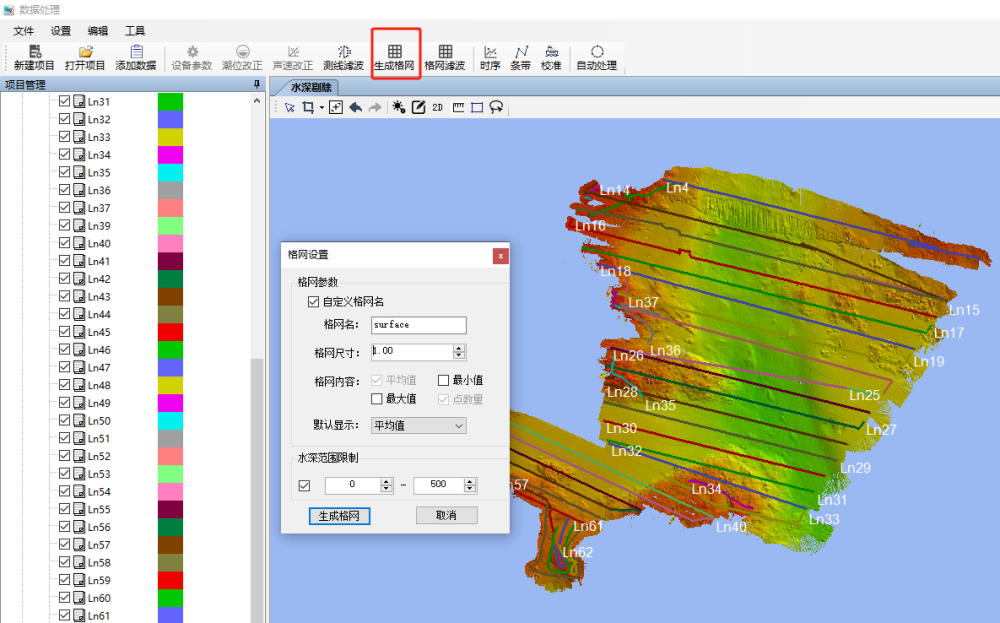
Редактирование раздела
Редактирование После завершения полос,Теперь вы можете приступить к редактированию раздела.,Нажмите [Создать сетку]
Размер ячейки может определяться автоматически или вводиться вручную. Как правило, ввод 0,5 метра, 1 метра или 2 метров для обычных ячеек матрицы мелководья может удовлетворить потребности регулярного использования.
Следующий шаг — натянуть профиль на сетку и удалить шумовые точки в виде сечений на основе согласованности рельефа и непрерывности данных в области перекрытия нескольких линий съемки. Обычно операции удаления данных о шуме необходимо выполнять как в горизонтальном, так и в вертикальном направлениях.
Его необходимо удалять по частям до тех пор, пока все данные шума не будут считаться удаленными, после чего данные можно будет сохранить и вывести.
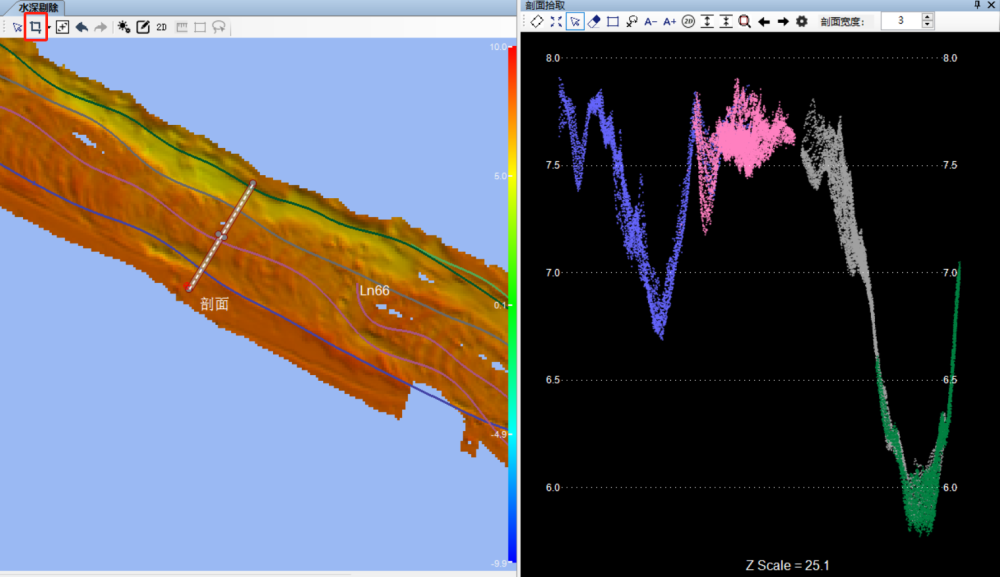
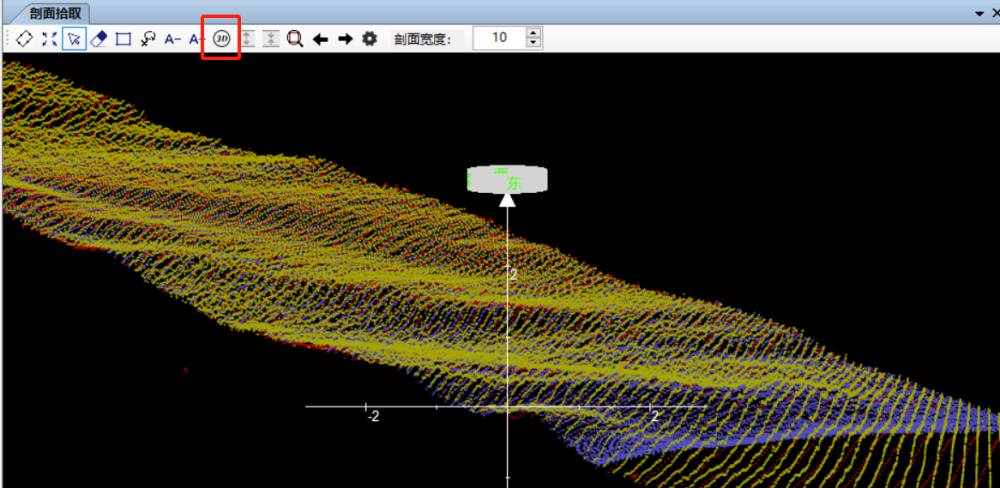
На 3D-виде показано:Вы можете нажать на верхнюю часть окна, чтобы переключить секцию вытягивания.3dвид,Перетащите, используя правую кнопку мыши,Колесо прокрутки для увеличения
Многолучевая калибровка
Создайте новый проект калибровки отклонения угла установки.
Импорт файла калибровочной линии
Используйте автоматическую фильтрацию обработки, чтобы отфильтровать места с отклонениями, а затем сгенерировать данные проверки профиля сетки. Если очевидных мест с отклонениями нет, нажмите [Калибровать], чтобы начать процесс калибровки.
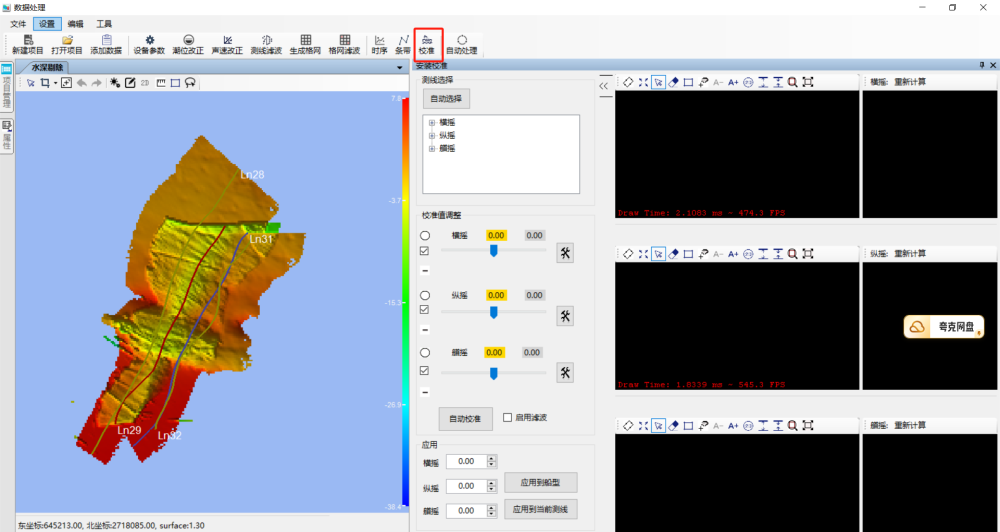
Нажмите [Выбрать профиль], чтобы выбрать подходящий профиль для расчета. Когда результат расчета — [Хорошо/Очень хорошо], можно начать следующий расчет отклонения установки.
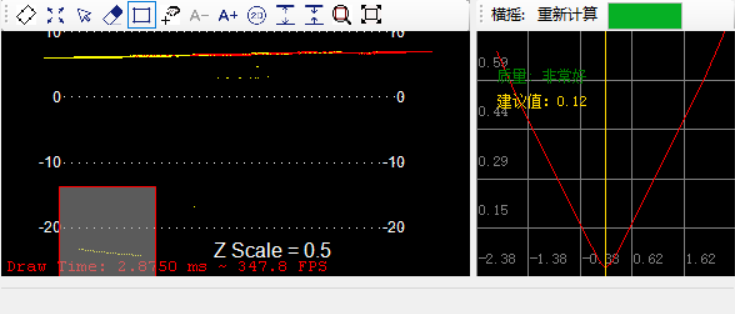
До тех пор, пока не будет найдена идеальная U-образная кривая погрешности, можно считать, что идеальное значение отклонения установки на текущем участке найдено.
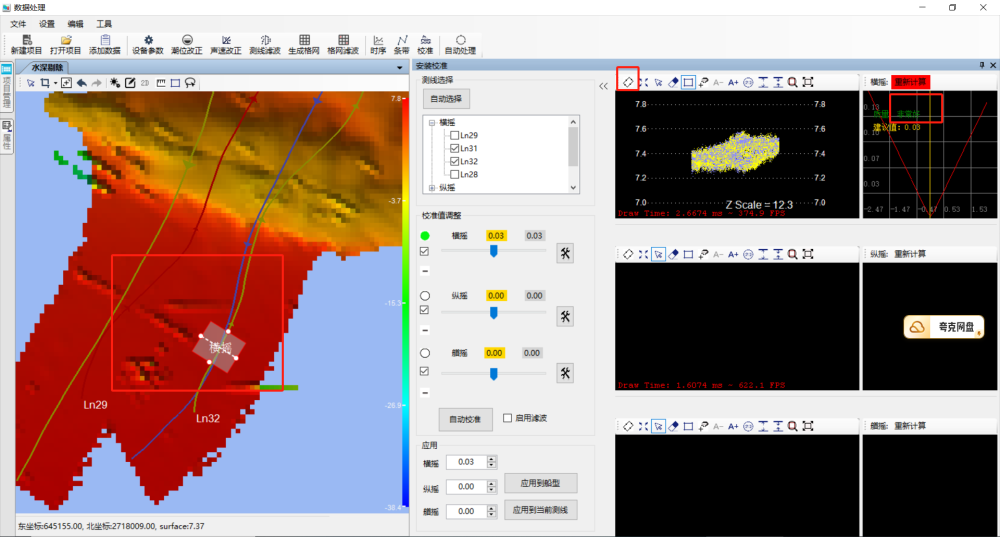
В процессе расчета точки шума в текущем разделе можно удалять, чтобы они не влияли на результаты расчета.
① Измерение отклонения установки валика (ролла): одна и та же измерительная линия проходит через плоскую область морского дна, а данные поперечного сечения двух полос с одинаковой скоростью и обратным направлением проверяют крен датчика.
② Измерение отклонения установки шага: одна и та же измерительная линия проходит через участок с резкими или большими изменениями глубины воды, а данные центральной линии пути двух полос с одинаковой скоростью и обратным направлением используются для проверки шага датчика.
③ Измерение отклонения установки от курса: две параллельные линии съемки проходят через участки с резкими или большими изменениями глубины воды (обеспечьте перекрытие покрытия более 50% с одной стороны), а края двух полос с одинаковой скоростью и направлением перекрываются. Проверка данных наклон преобразователя.
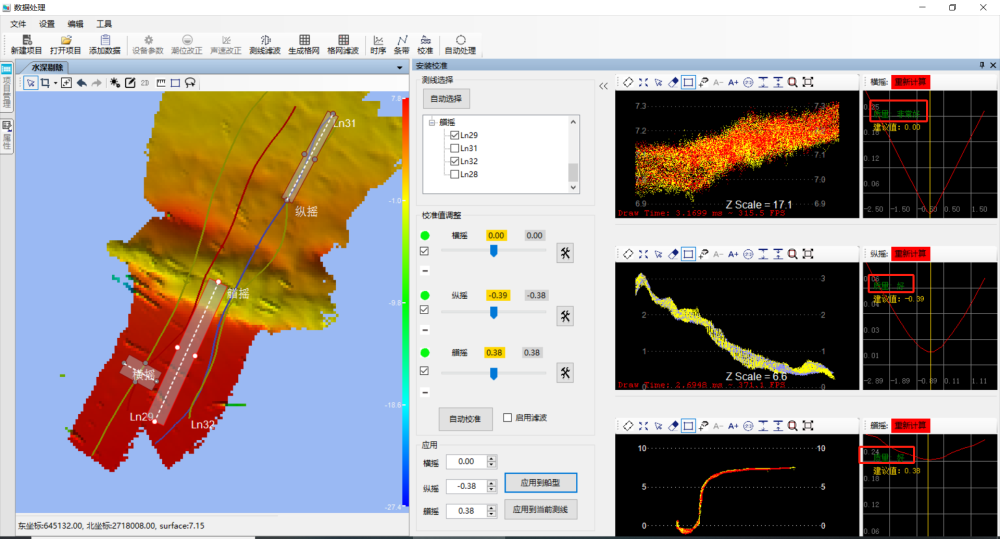
После завершения расчета обратитесь к кривой качества калибровочного значения справа. Если качество не соответствует требованиям, вы можете перетащить ползунок, чтобы вручную настроить его, пока оно не будет соответствовать требованиям калибровки. Нажмите «Применить к текущей линии съемки», и программное обеспечение выведет значение калибровки к линии съемки.
Нажмите «Применить к текущей линии измерения». Когда появится диалоговое окно «Применить успешно», значение калибровки будет применено к открытой в данный момент линии измерения и будет применено к разделу «Параметры установки» интерфейса «Параметры настройки». . Откройте интерфейс «Установить параметры», чтобы проверить успешность применения приложения.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
