Перекрестные помехи на общей коммуникационной шине MCU (1) — UART и USART
🙌Домашняя страница программиста Акинаяма 😂oi Игрок на пенсии, увлекается Java, большими данными, микроконтроллерами и Интернетом вещей, любит технологии, технологии не виноваты. 🎉Добро пожаловать, подписывайтесь🔎Мне нравится👍Собрать⭐️Оставить сообщение📝
Предисловие
Во-первых, разъясним понятие о коммуникационной шине и протоколе связи в MCU. Коммуникационная шина — это физический интерфейс, используемый для подключения различных периферийных устройств и модулей. Он может передавать данные и управлять информацией. Протокол связи относится к правилам и соглашениям, которым следуют при передаче данных по коммуникационной шине, чтобы обеспечить правильный обмен информацией между различными устройствами. Мы также можем назвать его протоколом коммуникационной шины.
В этой серии статей в основном объясняются следующие протоколы шины, которые читатели могут выбрать в соответствии со своими потребностями:
- УАРТ и УАРТ
- Шина RS232, RS485
- автобус ИИК
- Шина SPI
- CAN-шина
- USB-шина
1. Введение
UART: универсальный асинхронный приемник/передатчик, универсальный асинхронный приемник и передатчик. USART: универсальный синхронный/асинхронный приемник/передатчик, универсальный синхронный/асинхронный последовательный приемник/передатчик.
UART — это общий протокол асинхронной последовательной связи, который использует стартовые биты, биты данных, проверочные биты и стоповые биты для передачи данных. При связи UART данные передаются с фиксированной скоростью передачи. Передающая и принимающая стороны должны заранее согласовать такие параметры, как скорость передачи данных, биты данных, контрольные биты и стоповые биты. UART обычно используется для подключения микроконтроллеров, датчиков, периферийных устройств и т. д., а также широко используется в последовательной связи в компьютерных системах.
USART — более сложный протокол последовательной связи, поддерживающий как синхронные, так и асинхронные методы передачи данных. В отличие от UART, USART может выбирать синхронный или асинхронный режим связи и предоставляет больше возможностей управления, таких как аппаратное управление потоком, двусторонняя связь и т. д. USART обычно используется в сценариях, требующих высокой скорости передачи данных, двусторонней связи или более гибкого управления.
2. Формат кадра
UART:

- Стартовый бит Bit):Индикация стартового битаданныеначало кадра。это всегдаНизкий логический уровень и указывает на то, что передача данных вот-вот начнется.。
- данные Кусочек(Data Биты): Биты данных представляют собой фактическую часть передачи данных. Он представляет собой передаваемые данные, которые могут иметь длину 5, 6, 7 или 8 бит, в зависимости от выбранной длины данных.
- Паритет Бит): бит проверки является необязательным и используется для обнаружения ошибок во время передачи. Общие методы проверки включают нечетность, четность или отсутствие четности. Выбор контрольных цифр зависит от правил проверки, заранее согласованных обеими сторонами.
- Стоповый бит (Стоп Bit):останавливаться Кусочекотметкаданныеконец кадра。это всегдаВысокий логический уровень используется для информирования принимающей стороны о том, что кадр данных передан.。
В процессе отправки скорость передачи данных отправителя и получателя должна быть согласованной. Чтобы уменьшить накопленную ошибку, максимум 1 байт, то есть максимальное количество отправляемых битов данных, составляет 8 бит.
USART поддерживает синхронный режим, поэтому для USART требуется сигнал синхронизации USART_CK. Как правило, синхронные сигналы редко используются в микроконтроллерах, поэтому USART и UART используются одинаково, оба используют асинхронный режим.
3. Подключение оборудования
Существуют некоторые различия в аппаратных соединениях между USART и UART, главным образом потому, что USART поддерживает синхронную связь, а UART — нет. Вот как подключено их оборудование:
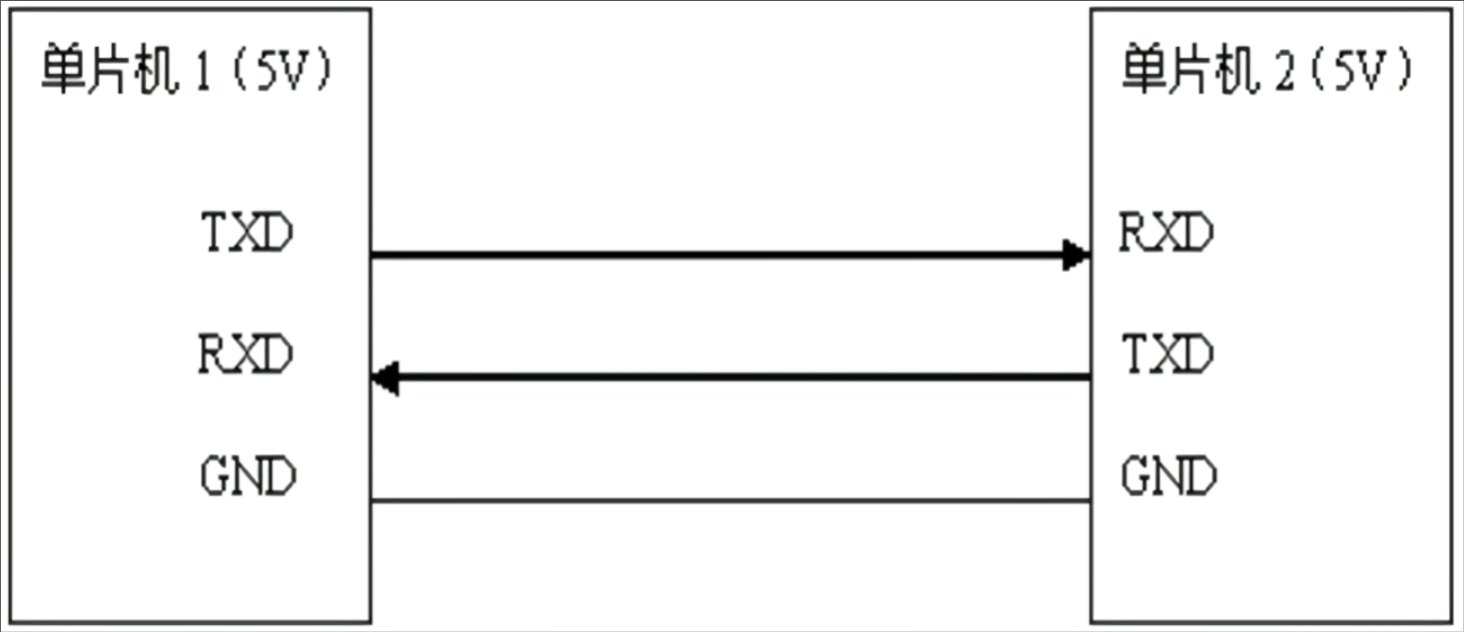
- Аппаратное соединение UART:
- UART обычно использует три провода: TX (передатчик), RX (приемник) и земля (GND). Линия TX на передающей стороне соединяется с линией RX на принимающей стороне.,Линия TX на принимающей стороне соединена с линией RX на передающей стороне. также,Заземляющие провода на обоих концах должны быть вместе.,чтобы гарантировать, что опорный потенциал сигналов одинаков.
- В микроконтроллере или встроенной системе,UART обычно поступает через контакты на чипе.,Например, контакт TX микроконтроллера к контакту RX внешнего устройства.,Вывод RX микроконтроллера подключается к выводу TX внешнего устройства.
- Аппаратное обеспечение USART:
- Метод соединения USART аналогичен UART.,Но в синхронном режиме также требуется линия тактирования (CLK). поэтому,USART обычно использует четыре провода в синхронном режиме: TX, RX, CLK и GND.
- При синхронизации с USART связью,Отправителю и получателю необходимо использовать тактовый сигнал.,Поэтому для соединения необходимы дополнительные линии синхронизации.
В общем, основная разница в аппаратном соединении между UART и USART заключается в том, нужно ли подключать линию синхронизации.
4. Режим работы
- передача данных Симплексный режим (Связь) односторонняя. общение между обеими сторонами,Одна сторона фиксируется как отправитель,Одна сторона фиксируется как принимающая сторона. Информация может распространяться только в одном направлении,Используйте линию передачи.
- Полудуплексный режим (Полудуплексный режим) Дуплекс) используют одну и ту же линию передачи,Вы можете как отправлять, так и получать данные,Но отправка и получение не могут осуществляться одновременно. передача данных позволяет передавать данные в обоих направлениях,но,данные могут быть отправлены только одной из сторон в любое время,Другая сторона получает данные. Поэтому полудуплексный режим может использовать одну линию данных.,Также возможно использовать две строки данных. Полудуплексная связь требует наличия электронного переключателя трансивера на каждом конце.,Решите, в каком направлении будут передаваться данные путем переключения. Потому что есть переключатель,Так что будет задержка во времени,Эффективность передачи информации ниже.
- Полнодуплексный режим (Polny Duplex) связи позволяет передавать данные в обоих направлениях одновременно. поэтому,Полнодуплексная связь представляет собой комбинацию двух режимов симплексной связи.,Для этого требуется, чтобы отправляющее устройство и принимающее устройство имели независимые возможности приема и отправки. В полнодуплексном режиме,На каждом конце есть передатчик и приемник,Есть две линии передачи,Эффективность передачи информации высокая.
Очевидно, что при одинаковых других параметрах полнодуплексная передача происходит быстрее и эффективнее полудуплексной.
5. Процесс использования
- Инициализация: Сначала необходимо инициализировать модуль UART, включая настройку скорости передачи данных (Baud Скорость), длина бита данных, проверочный бит и стоповый бит и другие параметры. Эти параметры должны соответствовать одноранговому устройству связи, чтобы обеспечить нормальную передачу данных.
- Отправка данных: Чтобы отправить данные, сначала запишите данные для отправки в буфер отправки UART. После программной записи данных в буфер передачи модуль UART автоматически отправит данные. Перед отправкой данных необходимо проверить, пуст ли буфер отправки, чтобы гарантировать возможность безопасной записи новых данных.
- Получение данных: При получении данных необходимо проверить, есть ли новые данные, доступные для чтения в буфере приема. Если в приемном буфере есть читаемые данные, их можно считать и обработать программно.
- Обработка ошибок: Во время процесса связи UART могут возникнуть некоторые ошибки, такие как ошибки проверки или ошибки кадра. При получении данных необходимо своевременно проверять флаг ошибки для соответствующей обработки и восстановления ошибки.
- Обработка прерываний. Чтобы повысить скорость отклика и эффективность системы, прерывания UART обычно используются для обработки приема и передачи. В случае использования прерываний необходимо написать соответствующую процедуру обслуживания прерываний (ISR) для обработки ситуации, когда получено новое сообщение или буфер отправки пуст.
- Завершение работы и очистка: когда программа завершается или UART больше не нужен, необходимо выключить модуль UART и выполнить соответствующую работу по очистке ресурсов, чтобы освободить связанные ресурсы и закрыть соответствующие прерывания.
Конкретный пример (MCU — STM32F103)
#include "bsp_usart.h"
/**
* @brief Конфигурация Вложенный векторный контроллер прерываний NVIC
* @param никто
* @retval никто
*/
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Выбор группы вложенных векторных контроллеров прерываний */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* КонфигурацияUSART — источник прерываний */
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
/* Кража приоритета*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* подприоритет */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* Включить прерывания */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* Инициализация конфигурации NVIC */
NVIC_Init(&NVIC_InitStructure);
}
/**
* @brief USART GPIO Конфигурация,Рабочие параметры Конфигурация * @param никто
* @retval никто
*/
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// Включите часы последовательного порта GPIO.
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// Включите часы периферийного устройства последовательного порта.
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// Будет ли USART GPIO Tx — это режим двухтактного мультиплексирования.
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// Будет ли USART Конфигурация GPIO Rx находится в режиме плавающего ввода.
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// Рабочие параметры Конфигурация последовательного порта
// Конфигурация
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// Конфигурация Длина слова данных иглы
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// Конфигурацияостанавливаться Кусочек
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// Конфигурацияпроверять Кусочек
USART_InitStructure.USART_Parity = USART_Parity_No ;
// Конфигурация аппаратного управления потоком данных
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// Конфигурация рабочего режима, отправка и получение одновременно
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// Завершите инициализацию последовательного порта. Конфигурация.
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// Уровень приоритета прерывания последовательного порта Конфигурация
NVIC_Configuration();
// Включить прерывание приема последовательного порта
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// Включить последовательный порт
USART_Cmd(DEBUG_USARTx, ENABLE);
// Очистить флаг завершения отправки
//USART_ClearFlag(USART1, USART_FLAG_TC);
}
/***************** отправить персонажа **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* Отправить один байт данных в USART */
USART_SendData(pUSARTx,ch);
/* Ожидание отправки данных. Регистр пуст. */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** Отправить строку **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
/* Дождитесь завершения отправки */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET)
{}
}
/***************** Отправьте 16-значный номер **********************/
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch)
{
uint8_t temp_h, temp_l;
/* Уберите верхние восемь цифр */
temp_h = (ch&0XFF00)>>8;
/* Удалить младшие восемь бит */
temp_l = ch&0XFF;
/* Отправить старшие восемь битов */
USART_SendData(pUSARTx,temp_h);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
/* Отправить младшие восемь битов */
USART_SendData(pUSARTx,temp_l);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
///Перенаправление функции библиотеки c printf на последовательный порт. Функцию printf можно использовать после перенаправления.
int fputc(int ch, FILE *f)
{
/* Отправьте байтовые данные в последовательный порт */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* Ожидание завершения отправки */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///Перенаправляем функцию библиотеки c scanf на последовательный порт. После перезаписи вы можете использовать scanf, getchar и другие функции.
int fgetc(FILE *f)
{
/* Ожидание ввода данных последовательного порта */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}наконец
Если эта статья была для вас полезна, пожалуйста, поддержите блогера трижды!



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
