Обмен бумагами | 3D-обнаружение целей в плохую погоду
Перепечатано из: Трехмерный мир ННУ.
Редактор: Дунъань из-за публичного аккаунта @немногоискусственного интеллекта
LiDAR является одним из важных датчиков для реальных задач трехмерного зондирования, но когда в оптической среде присутствуют частицы воды или снега, эти частицы взаимодействуют с лазерным лучом, в частности, поглощая, отражая или преломляя лазерный луч. Это взаимодействие приводит к двум важным эффектам: один заключается в том, что отраженная мощность объекта, принимаемая LiDAR, ослабляется, другой заключается в том, что обратное рассеяние частиц вызывает псевдомаксимальное значение полученной мощности, которое отличается от истинного расстояния до объекта; В пределах диапазона генерируются ложные эхо-сигналы. Таким образом, из-за сильных шумовых помех захваченное облако точек претерпит сдвиг области, который значительно отличается от такового при обычной погоде, что приведет к серьезному ухудшению качества измерений. Это явление отрицательно влияет на производительность сложных задач, таких как обнаружение 3D-объектов. Далее будут представлены три смежные исследовательские работы:
01 Надежное 3D-обнаружение целей в дождливую погоду
Название диссертации: На пути к надежному обнаружению 3D-объектов в дождливых условиях
В ролях: Альди Пироли, Винценц Даллабетта, Йоханнес Копп.
Включенные журналы (конференции): ITSC 2023
Ссылка на документ: https://arxiv.org/pdf/2310.00944.pdf.
1.1 Мотивация и вклад
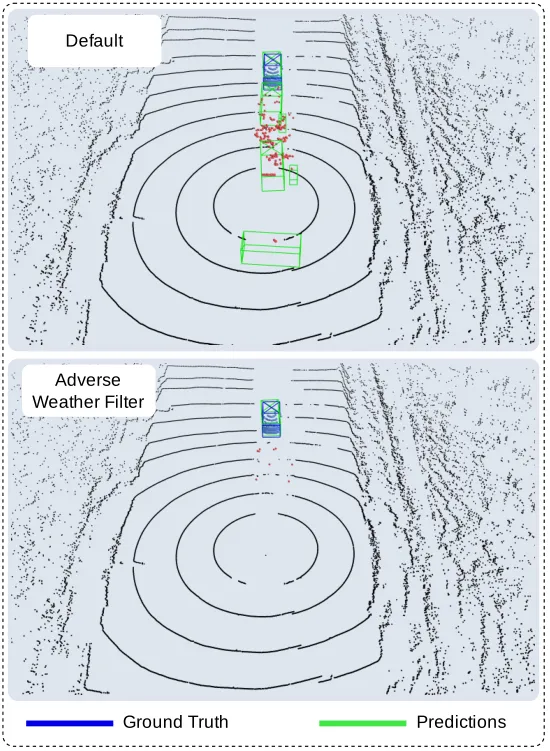
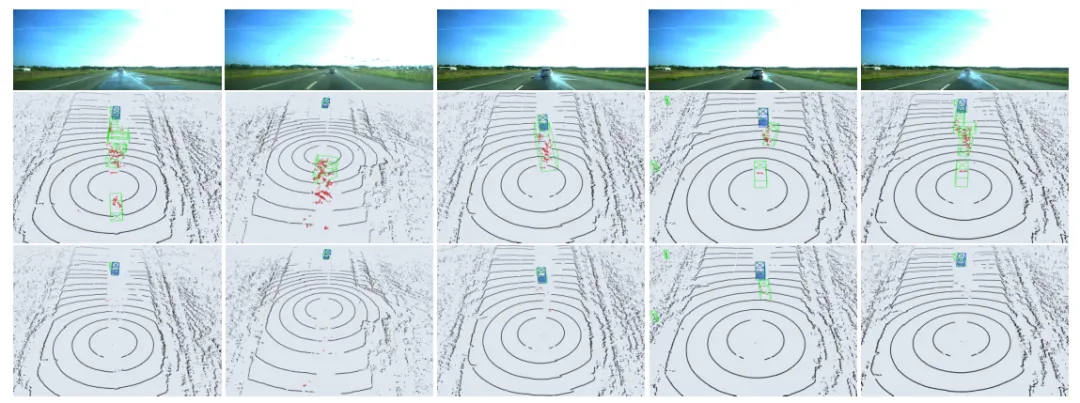
Эффект разбрызгивания воды особенно заметен, когда автомобиль движется на высокой скорости по скользкой дороге. В результате качения автомобильных шин капли воды на земле отбрасываются назад, образуя коридор для разбрызгивания. Эти капли воды улавливаются датчиком LiDAR и превращаются в помехи при измерении. На работу детектора объектов, обученного в нормальных погодных условиях, попадание таких водяных брызг существенно повлияет (рис. 1-1). Данное воздействие проявляется, в частности, в обнаружении промаха цели, то есть невозможности обнаружения цели из-за затруднения поля зрения, и генерации фантомных целей, что представляет собой введение ложноположительных обнаружений в систему восприятия.
В ответ на вышеупомянутое явление в этой статье (1) предлагается структура, направленная на повышение помехозащищенности детекторов целей 3D LiDAR в дождливой среде. Структура основана на двухточечном механизме фильтрации суровых погодных условий. (2) Для мультимодальных конфигураций, содержащих LiDAR и радиолокационные датчики, авторы вводят радарные цели в качестве дополнительного этапа постобработки для эффективной фильтрации ложноположительных целей, генерируемых водяными брызгами. Результаты испытаний в реальных сценариях показывают, что метод, предложенный в этой статье, значительно повышает устойчивость нескольких детекторов целей к помехам от брызг дорожной воды, сохраняя при этом производительность в реальном времени.
1.2 Метод
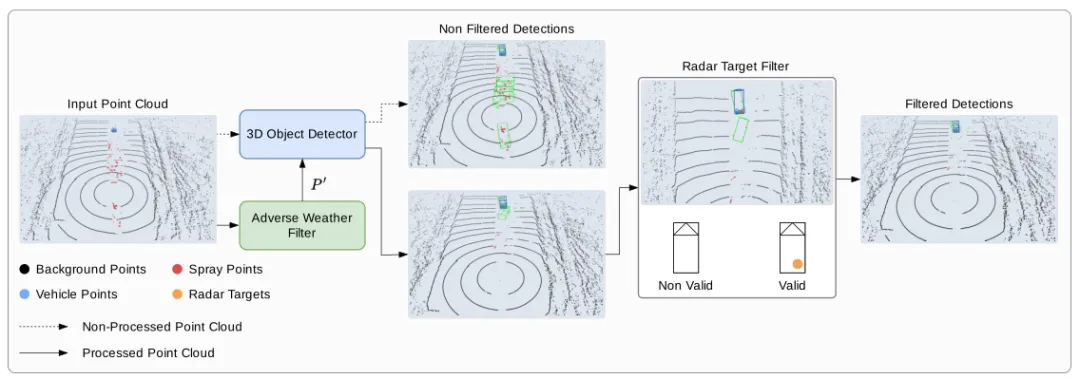
Ход метода, описанный в этой статье, показан на рисунке 1-2. Для данного облака точек P LiDAR сначала удалите все точки шума неблагоприятных погодных условий и получите отфильтрованное облако точек P0 в качестве входных данных детектора цели. По сравнению с использованием необработанных облаков точек непосредственно в качестве входных данных, на результаты обнаружения меньше влияют явления дорожных брызг. В мультисенсорных установках, включая радар, ложноположительные обнаружения дополнительно фильтруются путем проверки того, имеет ли обнаруженный объект связанную с ним радиолокационную цель, используя присущую ему устойчивость к неблагоприятным погодным условиям. Синий блок обнаружения представляет истинное значение, а зеленый блок обнаружения представляет прогнозируемое значение. (Подробнее см. в оригинальной статье)
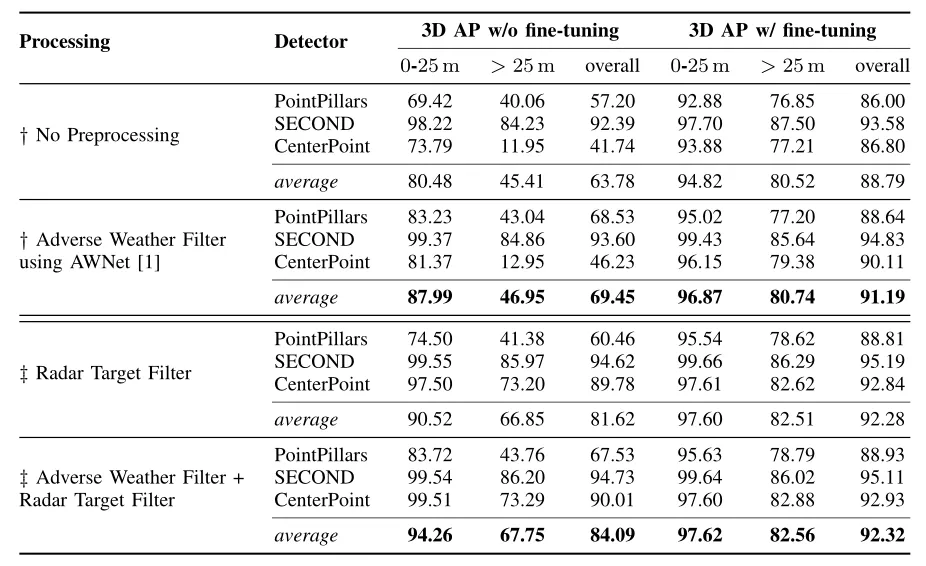
1.3 Экспериментальные результаты
02 Моделирование снегопада LiDAR для надежного обнаружения 3D-объектов
Название диссертации: Моделирование снегопада LiDAR для надежного обнаружения 3D-объектов
Авторы: Мартин Ханер, Христос Сакаридис, Марио Биелич и другие.
Включенные журналы (конференции): CVPR 2022
Ссылка на документ: https://arxiv.org/pdf/2203.15118.pdf.
Ссылка на код: https://github.com/SysCV/LiDAR_snow_sim
2.1 Результаты моделирования

В этой статье используются данные о солнечной погоде и генерируются данные о дожде и снеге на основе алгоритмов моделирования для повышения надежности трехмерного обнаружения целей в дождь и снег.
2.2 Метод моделирования
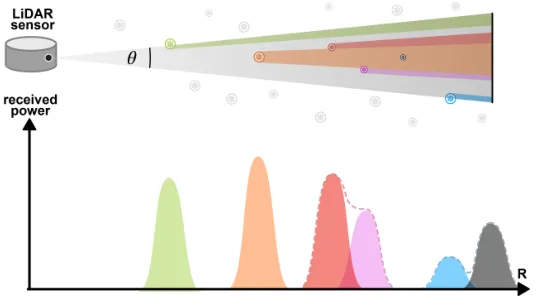
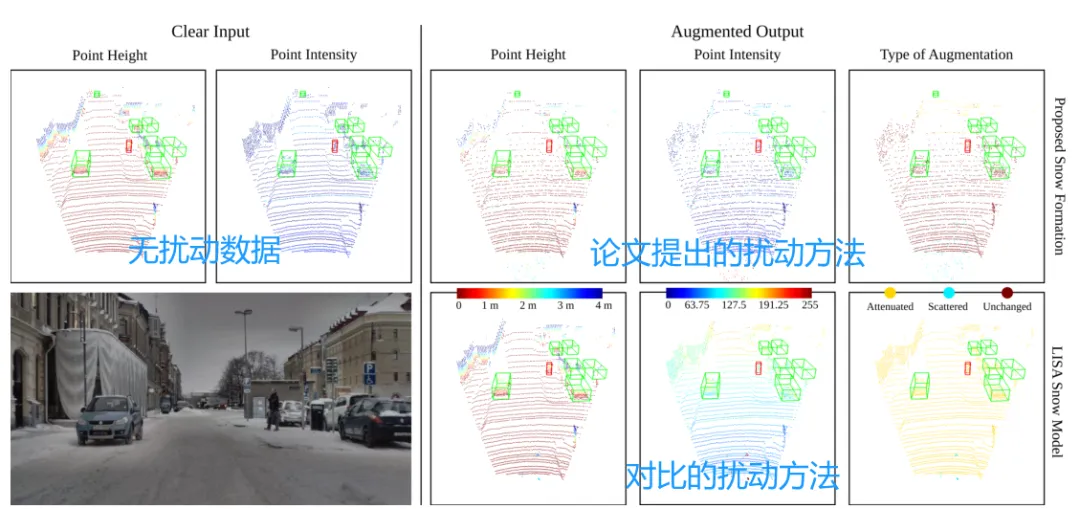
1. Поскольку сложно собирать и маркировать обучающие выборки в дождливых и снежных условиях, предлагается модель отражения лазерного луча для имитации снегопада, искажения данных облака точек реального лидара солнечной погоды и генерации виртуальных лидарных данных дождливой и снежной погоды.
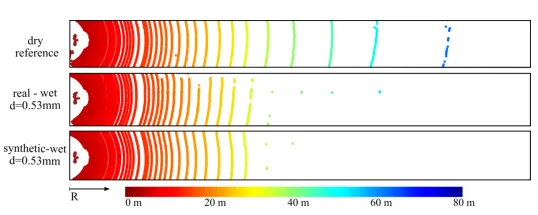
2. Поскольку снегопады часто вызывают намокание земли, предлагается использовать модель отражения лазерного луча от земли для имитации влажности почвы. Измените данные облака точек ясной погоды, чтобы сгенерировать данные о приемке облака точек, которые имитируют влажность почвы.
3. Используйте набор данных STF (набор данных об облаках точек экстремальных погодных условий), чтобы улучшить данные и обучить надежную модель обнаружения.
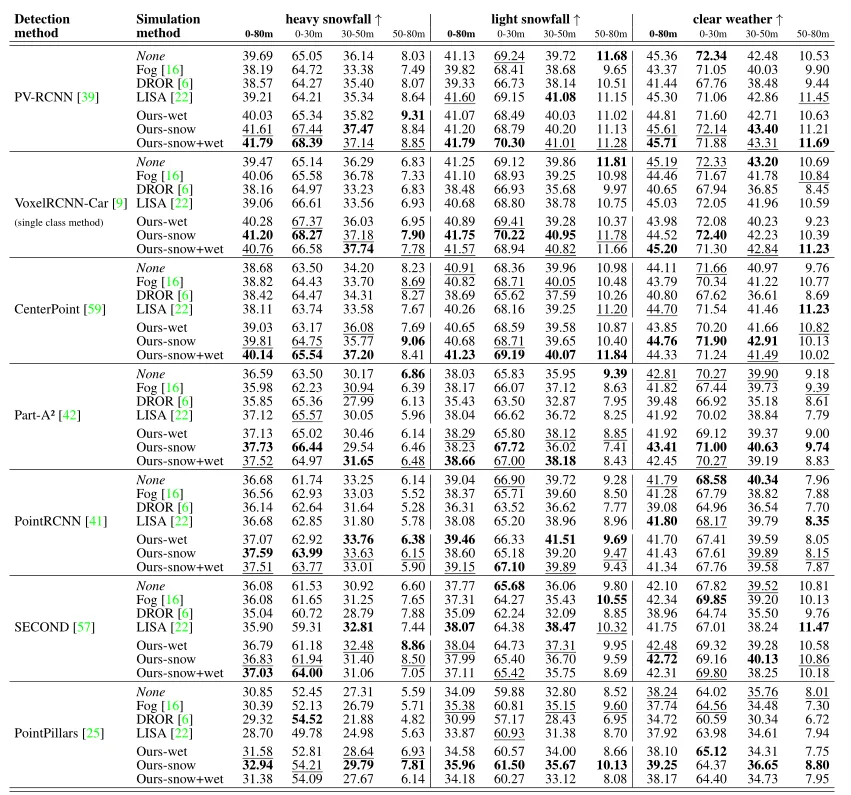
2.3. Результаты экспериментов
03 STF
Описание: Видеть сквозь туман, не видя тумана: Глубокое слияние мультимодальных датчиков в невидимой неблагоприятной погоде
Автор: Марио Биелич, Тобиас Грубер, Фахим Маннан и др.
Включенные журналы (конференции): CVPR 2020
Ссылка на документ: https://arxiv.org/pdf/1902.08913.pdf.
Ссылка на код: https://github.com/princeton-computational-imaging/SeeingThroughFog.
3.1 Мотивация и вклад
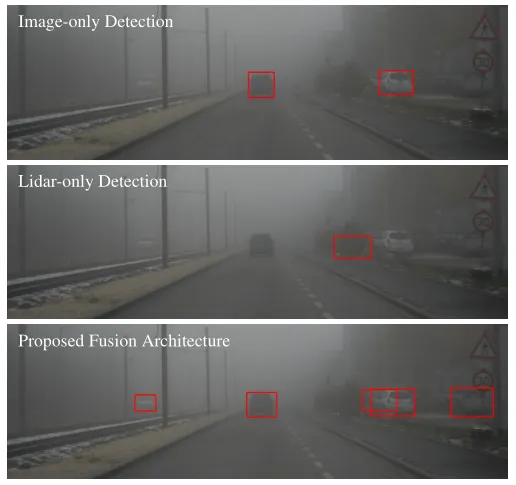
Существующие методы обнаружения объектов, такие как эффективные SSD, обучаются на наборах данных, находящихся в автомобиле, с учетом хороших погодных условий. Хотя эти методы хорошо работают при хороших условиях, они терпят неудачу во время редких погодных явлений (рис. 3-1). Детекторы, работающие только с лидаром, например, та же модель SSD, обученная на прогнозируемой глубине лидара, могут быть искажены сильным обратным рассеянием в тумане или снегу. Эти асимметричные искажения создают проблему для методов синтеза, которые полагаются на избыточную информацию.
В ответ на вышеуказанные проблемы в данной статье вносятся следующие вклады:
1) Представлен мультимодальный набор данных о суровых погодных условиях, включая данные камер, лидаров, радаров, датчиков ближнего инфракрасного диапазона и FIR. Набор данных содержит редкие сценарии, такие как сильный туман, сильный снегопад и сильный дождь, которые произошли во время более чем 10 000 километров езды по Северной Европе.
2) Предложить глубокую мультимодальную объединенную сеть, которая отличается от объединения на уровне предложения, но представляет собой адаптивное объединение, основанное на энтропии измерений.
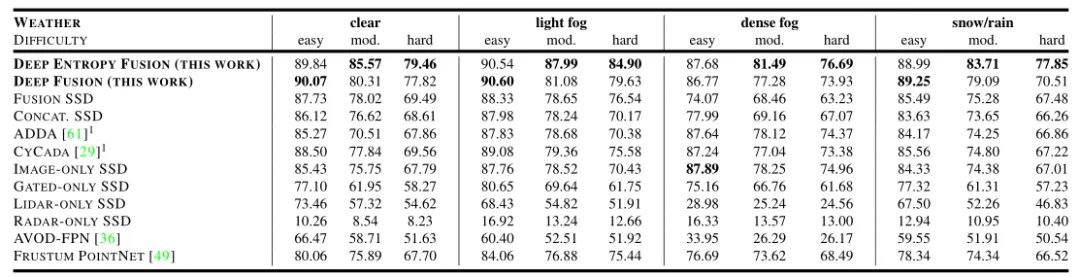
3) Оцените модель на предлагаемом наборе данных и убедитесь, что она обобщает невидимые асимметричные искажения. В суровых условиях, на которые не влияют погодные условия, включая легкий туман, густой туман, снегопад и ясную погоду, AP этого метода более чем на 8% выше, чем современный метод термоядерного синтеза, и он может работать. в реальном времени.
3.2 Набор данных
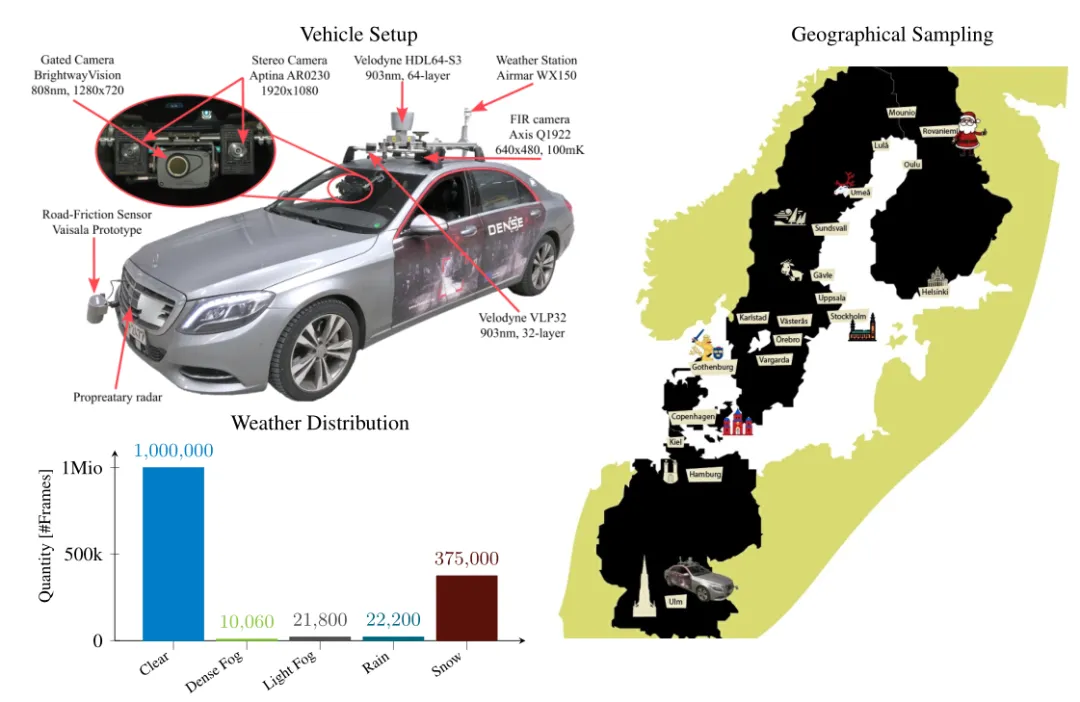
Справа: географический охват двухмесячной кампании по сбору данных протяженностью 10 000 километров в Германии, Швеции, Дании и Финляндии. Вверху слева: испытательный автомобиль, оснащенный верхним лидаром, камерой ворот со вспышкой, камерой RGB, радаром, камерой FIR, метеостанцией и датчиком сцепления с дорогой. Внизу слева: Распределение погодных условий на протяжении всего процесса сбора данных. (Подробнее см. в оригинальной статье)
3.3 Метод
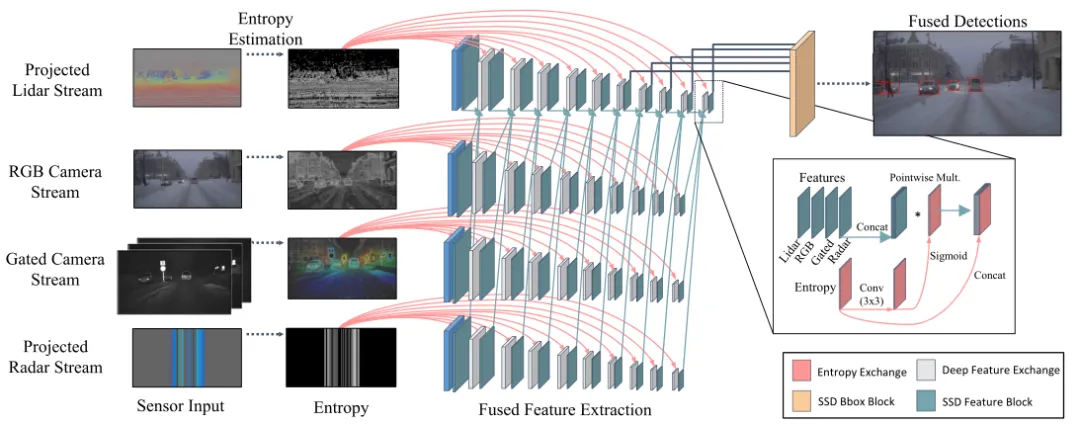
Общая архитектура состоит из четырех ветвей SSD с глубоким обменом функциями и адаптивным объединением лидара, камеры RGB, закрытой камеры и радара. Все сенсорные данные проецируются в систему координат камеры. Чтобы управлять объединением датчиков, модель опирается на энтропию датчиков, предоставляемую каждому модулю обмена функциями (красный). Модуль глубокого обмена функциями (белый) обменивается информацией с блоком параллельного извлечения функций (синий). Объединенные карты признаков анализируются с использованием блоков SSD (SSD). (Подробнее см. в оригинальной статье)
3.4. Результаты экспериментов
04 Подвести итог
Все три работы, представленные в этой статье, представляют собой исследования по автоматическому обнаружению движущихся целей в суровых условиях.
В первой работе предлагается процесс обнаружения, позволяющий повысить устойчивость методов 3D-обнаружения целей на основе LiDAR к явлениям дорожных брызг.
Во второй работе изучается проблема моделирования трехмерных данных обнаружения целей на основе LiDAR в условиях снегопада.
Третья работа предлагает мультимодальный набор данных для обнаружения целей в суровых условиях реального мира, а также предлагает сеть глубокого синтеза для надежного синтеза.
Автор считает, что в плохую погоду крайне небезопасно использовать только один модальный датчик для восприятия окружающей среды. Использование данных от нескольких модальностей (камер, LiDAR, радара, инфракрасных камер и т. д.) для повышения надежности обнаружения является важным способом. преодолевать суровые погодные условия. Единственный способ решения задач автономного вождения в погодных условиях.



Углубленный анализ переполнения памяти CUDA: OutOfMemoryError: CUDA не хватает памяти. Попыталась выделить 3,21 Ги Б (GPU 0; всего 8,00 Ги Б).

[Решено] ошибка установки conda. Среда решения: не удалось выполнить первоначальное зависание. Повторная попытка с помощью файла (графическое руководство).

Прочитайте нейросетевую модель Трансформера в одной статье

.ART Теплые зимние предложения уже открыты

Сравнительная таблица описания кодов ошибок Amap

Уведомление о последних правилах Points Mall в декабре 2022 года.

Даже новички могут быстро приступить к работе с легким сервером приложений.

Взгляд на RSAC 2024|Защита конфиденциальности в эпоху больших моделей

Вы используете ИИ каждый день и до сих пор не знаете, как ИИ дает обратную связь? Одна статья для понимания реализации в коде Python общих функций потерь генеративных моделей + анализ принципов расчета.

Используйте (внутренний) почтовый ящик для образовательных учреждений, чтобы использовать Microsoft Family Bucket (1T дискового пространства на одном диске и версию Office 365 для образовательных учреждений)

Руководство по началу работы с оперативным проектом (7) Практическое сочетание оперативного письма — оперативного письма на основе интеллектуальной системы вопросов и ответов службы поддержки клиентов

[docker] Версия сервера «Чтение 3» — создайте свою собственную программу чтения веб-текста

Обзор Cloud-init и этапы создания в рамках PVE

Корпоративные пользователи используют пакет регистрационных ресурсов для регистрации ICP для веб-сайта и активации оплаты WeChat H5 (с кодом платежного узла версии API V3)

Подробное объяснение таких показателей производительности с высоким уровнем параллелизма, как QPS, TPS, RT и пропускная способность.

Удачи в конкурсе Python Essay Challenge, станьте первым, кто испытает новую функцию сообщества [Запускать блоки кода онлайн] и выиграйте множество изысканных подарков!

[Техническая посадка травы] Кровавая рвота и отделка позволяют вам необычным образом ощипывать гусиные перья! Не распространяйте информацию! ! !

[Официальное ограниченное по времени мероприятие] Сейчас ноябрь, напишите и получите приз

Прочтите это в одной статье: Учебник для няни по созданию сервера Huanshou Parlu на базе CVM-сервера.

Cloud Native | Что такое CRD (настраиваемые определения ресурсов) в K8s?

Как использовать Cloudflare CDN для настройки узла (CF самостоятельно выбирает IP) Гонконг, Китай/Азия узел/сводка и рекомендации внутреннего высокоскоростного IP-сегмента

Дополнительные правила вознаграждения амбассадоров акции в марте 2023 г.

Можно ли открыть частный сервер Phantom Beast Palu одним щелчком мыши? Супер простой урок для начинающих! (Прилагается метод обновления сервера)

[Играйте с Phantom Beast Palu] Обновите игровой сервер Phantom Beast Pallu одним щелчком мыши

Maotouhu делится: последний доступный внутри страны адрес склада исходного образа Docker 2024 года (обновлено 1 декабря)

Кодирование Base64 в MultipartFile

5 точек расширения SpringBoot, супер практично!

Глубокое понимание сопоставления индексов Elasticsearch.

15 рекомендуемых платформ разработки с нулевым кодом корпоративного уровня. Всегда найдется та, которая вам понравится.
