Модуль восприятия Apollo: сенсорный мониторинг | управление моделью препятствий |
введение
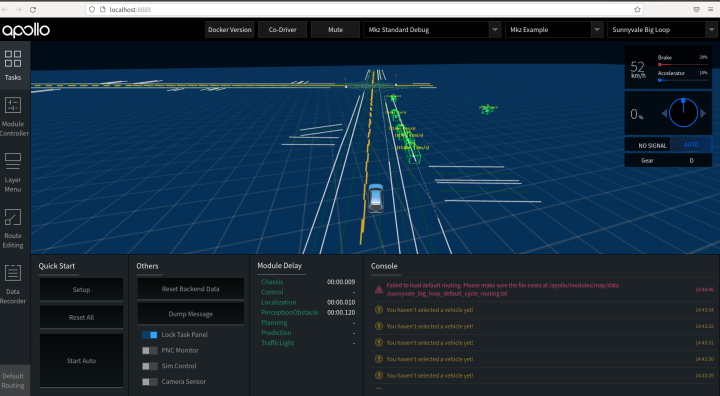
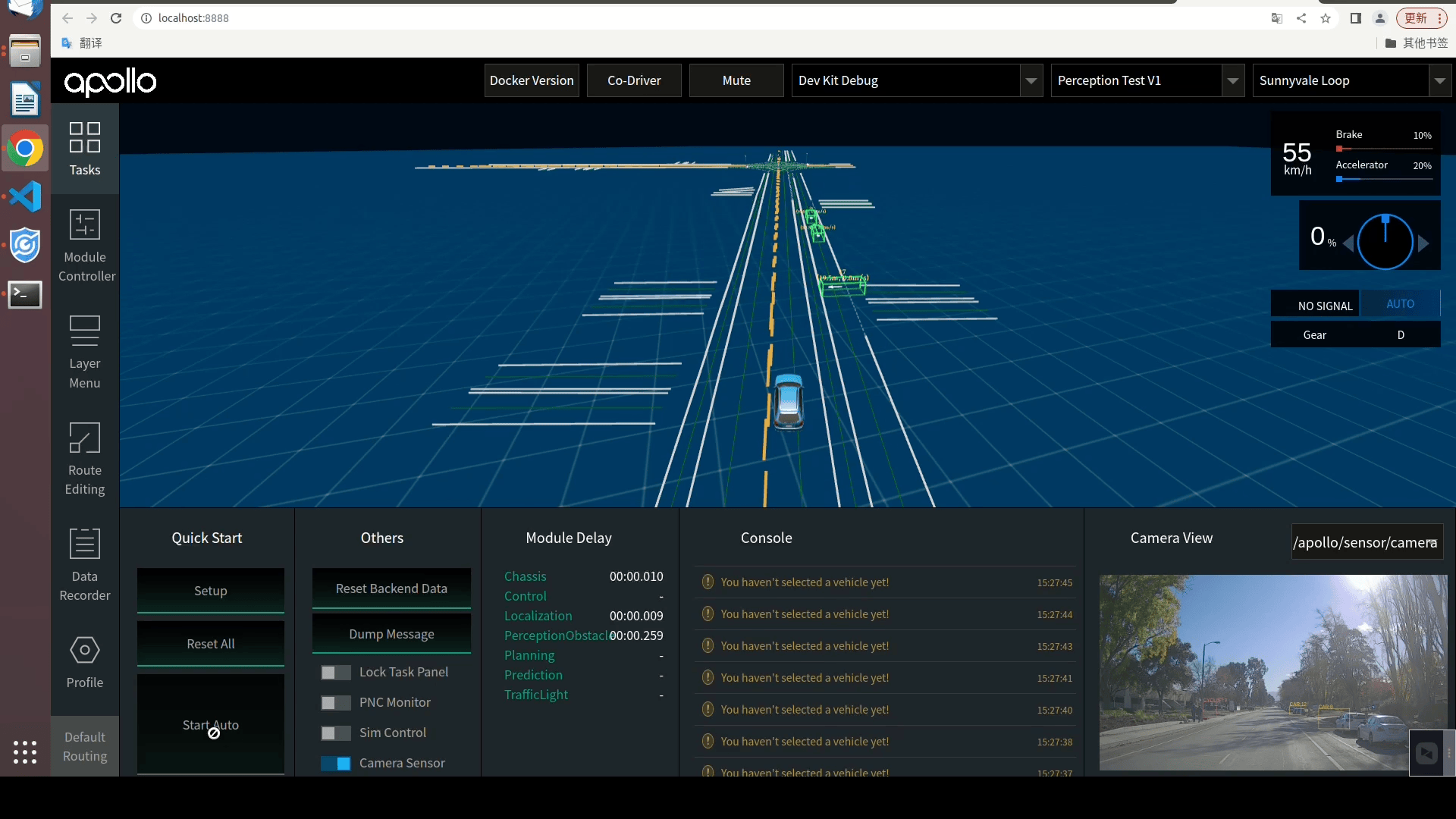
В технологии автономного вождения модуль восприятия является одним из основных компонентов системы автономного вождения. Модуль восприятия платформы Apollo играет ключевую роль, отвечая за сбор данных от различных датчиков для восприятия и понимания окружающей среды вокруг автомобиля.
1. Слияние датчиков
Платформа Apollo объединяет множество датчиков, включая лидар, камеры, радар и т. д. Каждый из этих датчиков предоставляет различные типы данных, например, лидар, предоставляющий информацию о расстоянии, камеры, предоставляющие информацию об изображении и т. д. Модуль восприятия использует технологию объединения датчиков для объединения данных от этих различных датчиков для получения более полной и точной информации об окружающей среде.
1.1 Подробное введение в объединение датчиков
1. Мультисенсорные источники данных: Система Apollo использует несколько типов датчиков, каждый из которых имеет свои уникальные характеристики и применимые сценарии. Лидар обычно используется для высокоточного обнаружения препятствий, камеры используются для визуального восприятия, а радар миллиметрового диапазона имеет лучшую адаптируемость к различным погодным условиям.
2. Объединение данных датчиков: Суть объединения датчиков заключается в объединении информации от разных датчиков для повышения точности и надежности восприятия окружающей среды. Это часто предполагает использование алгоритмов объединения датчиков, таких как фильтрация Калмана, расширенная фильтрация Калмана (EKF) и т. д., для интеграции измерений с различных датчиков.
3. Ли ДАР: Для высокоточного построения карт и обнаружения препятствий. LiDAR может предоставлять точную информацию о расстоянии и угле и подходит для высокоточного измерения на коротких расстояниях.
4. Камера: Предоставление визуальной информации для обнаружения цели, определения линии полосы движения и т. д. Визуальное восприятие играет важную роль в сложных дорожных условиях, но на него влияют такие факторы, как освещение и тени.
5. Радар миллиметрового диапазона: Адаптируйтесь к различным погодным условиям, таким как дождь и снег. Радар миллиметрового диапазона может обеспечить надежное обнаружение препятствий в плохую погоду.
6. ГНСС и инерциальные навигационные системы (ИНС): Используется для позиционирования автомобиля. Глобальные навигационные спутниковые системы (GNSS) предоставляют информацию о глобальном местоположении, а инерциальные навигационные системы используют такие датчики, как акселерометры и гироскопы, для оценки ускорения и угловой скорости транспортного средства.
7. Калибровка датчика: Чтобы обеспечить точность сварки, Apollo регулярно выполняет калибровку датчиков. Сюда входит внутренняя калибровка, такая как калибровка внутренних параметров камеры и лидара, а также внешняя калибровка, такая как выравнивание лидара по системе координат транспортного средства.
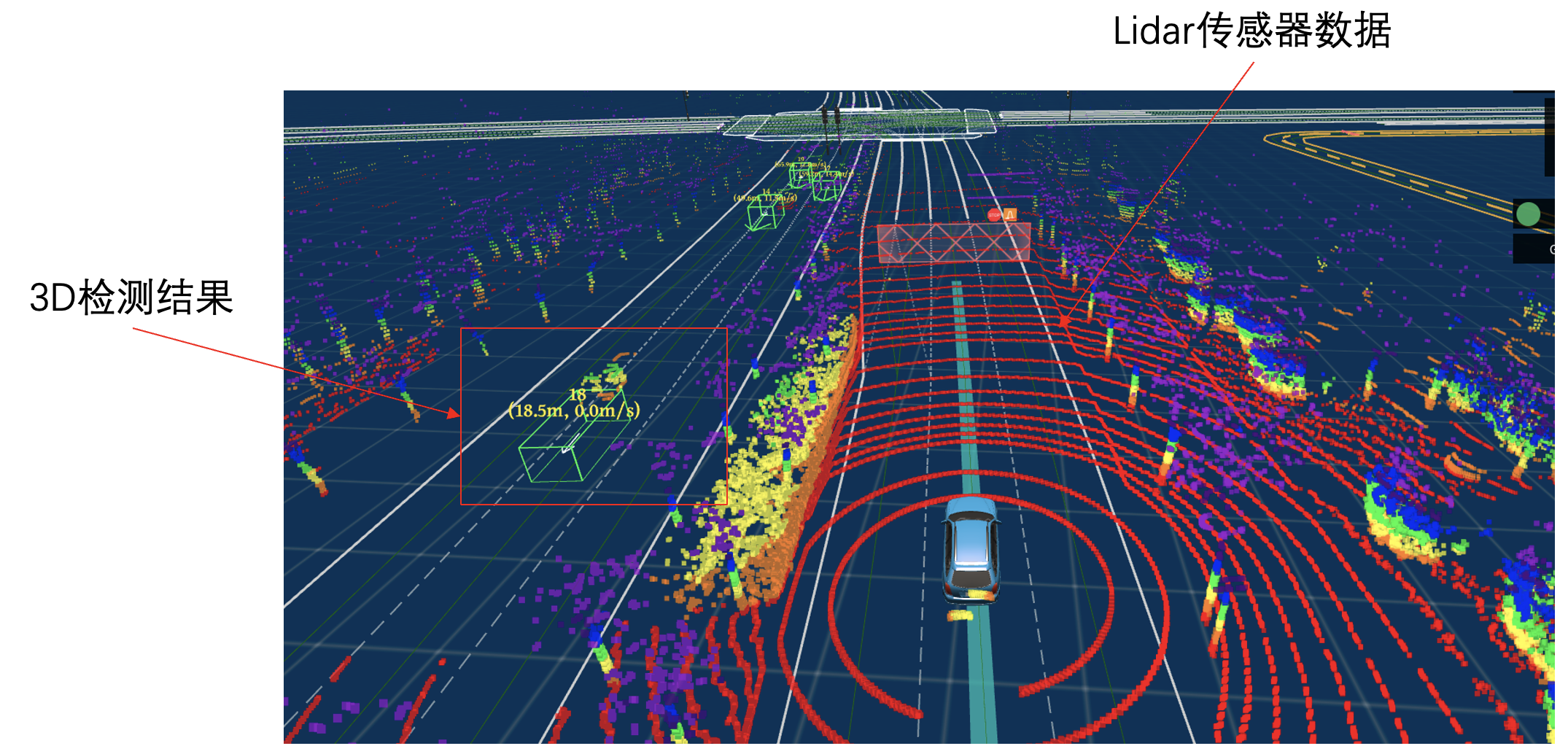
2. Обнаружение цели
На основе объединения датчиков модуль восприятия использует усовершенствованные алгоритмы обнаружения целей для идентификации и определения местоположения целевых объектов вокруг автомобиля. Целями могут быть другие транспортные средства, пешеходы, дорожные знаки и т. д. Обнаружение цели является ключевым этапом модуля восприятия, предоставляющим важную информацию для последующего принятия решений и планирования.
Пример кода обнаружения цели:
// Пример кода
#include <apollo/sensors/lidar.h>
#include <apollo/perception/object_detection.h>
int main() {
// Инициализировать лидар
Lidar lidar;
lidar.Init();
// Получить данные лидара
LidarData lidar_data = lidar.GetLidarData();
// Обнаружение цели
ObjectDetection object_detection;
std::vector<Object> detected_objects = object_detection.DetectObjects(lidar_data);
// Результаты испытаний процесса
for (const auto& obj : detected_objects) {
std::cout << "Detected Object: " << obj.type << " at (" << obj.x << ", " << obj.y << ")\n";
}
return 0;
}3. Идентификация препятствий
Благодаря обнаружению целей модуль восприятия может определить влияние идентифицированных целевых объектов на вождение автомобиля и классифицировать их как препятствия. Результаты распознавания препятствий имеют большое значение для этапов принятия решений и планирования системы автономного вождения, помогая системе избегать столкновений и безопасно управлять автомобилем.
4. Управление моделями
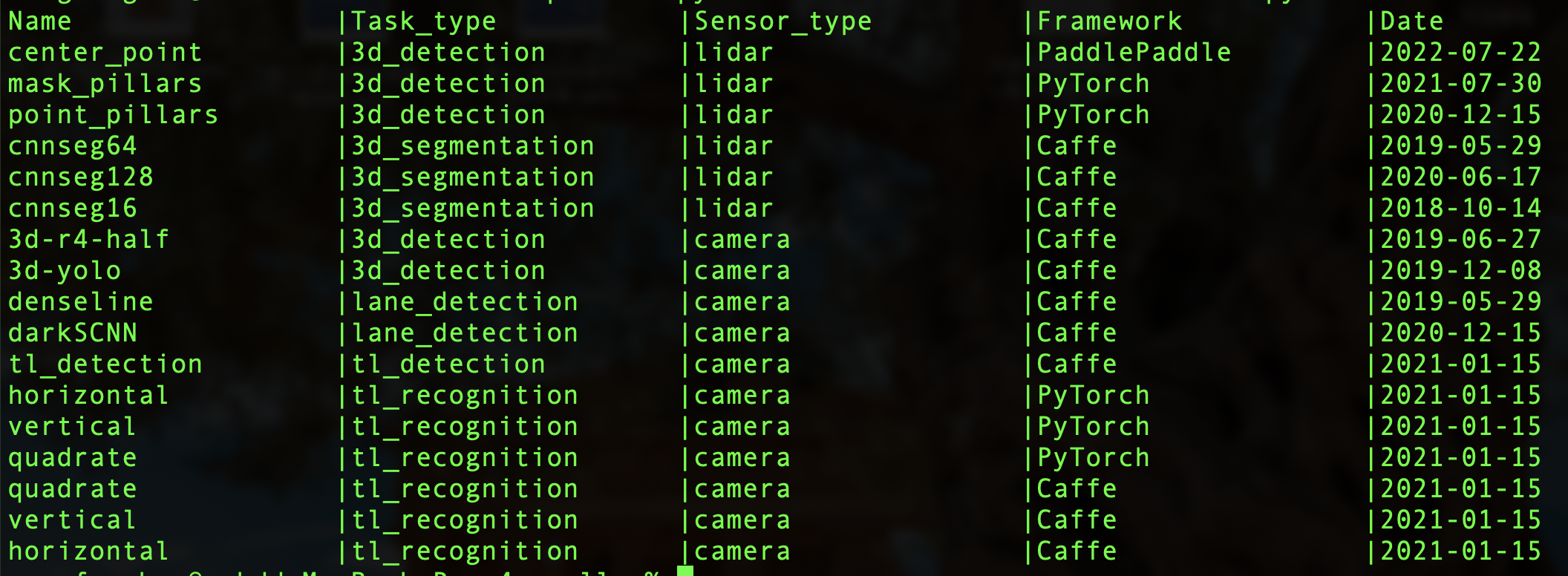
Мета-модель и управление моделями также представлены в Apollo 8.0. Среди них модель Meta содержит основную информацию о модели, такую как имя, тип задачи, тип датчика, структуру и наборы данных, необходимые для обучения. Она также включает стандартный ввод, ввод, предварительную и постобработку модели. , путь для хранения файлов модели и т.д. Стандартизируя модель с помощью этой информации, разработчикам нужно только убедиться, что входные и выходные данные модели согласованы, а затем они могут напрямую заменить модель, чтобы повысить эффективность разработки модели.
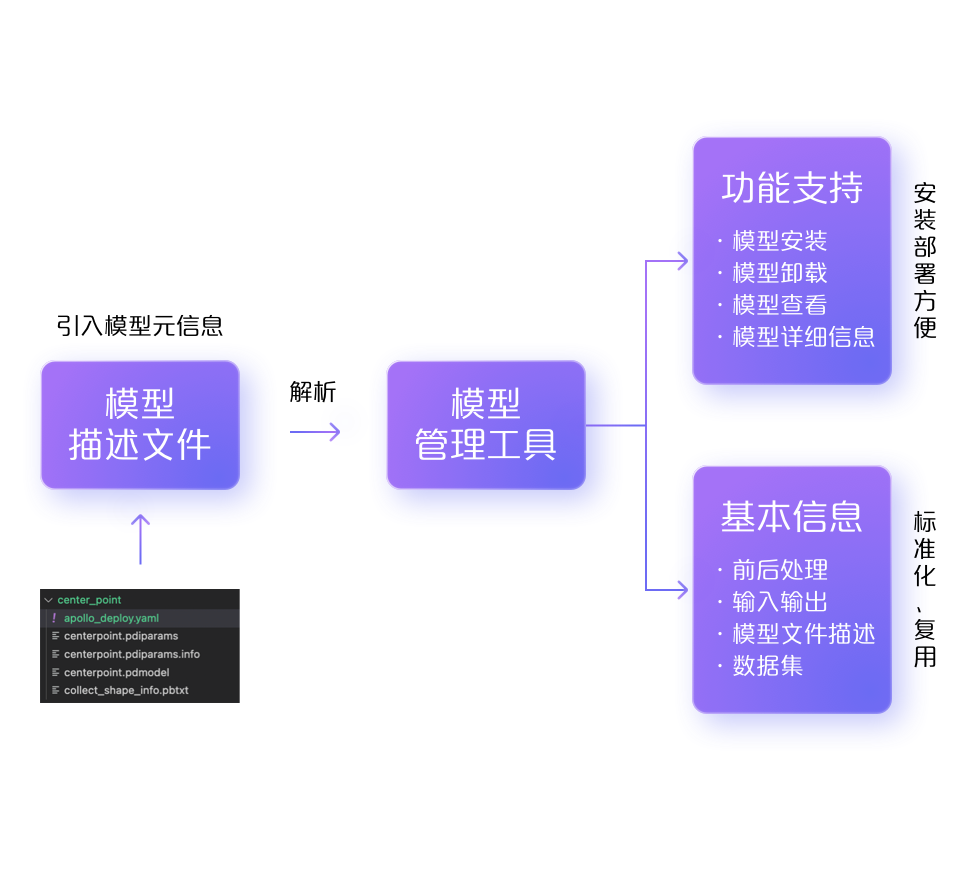
Он также предоставляет инструмент управления моделями, с помощью которого разработчики могут загружать и устанавливать модели в хранилище моделей и отображать модели и сведения о моделях, которые были установлены в системе. И управляйте этими моделями, чтобы повысить эффективность развертывания моделей.
Для конкретных методов использования вы можете проверить официальную документацию.
Заключение
Эффективная работа модуля восприятия является важной гарантией достижения безопасного автономного вождения и обеспечивает необходимую информационную основу для последующих модулей принятия решений и управления. Я надеюсь, что эта статья поможет разработчикам лучше понять и применить функции восприятия платформы Apollo и способствовать постоянному развитию технологий автономного вождения.



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
