[Matlab] Использование файлов DBC в связи CAN (Vehicle Network Toolbox)
Открыть файл DBC
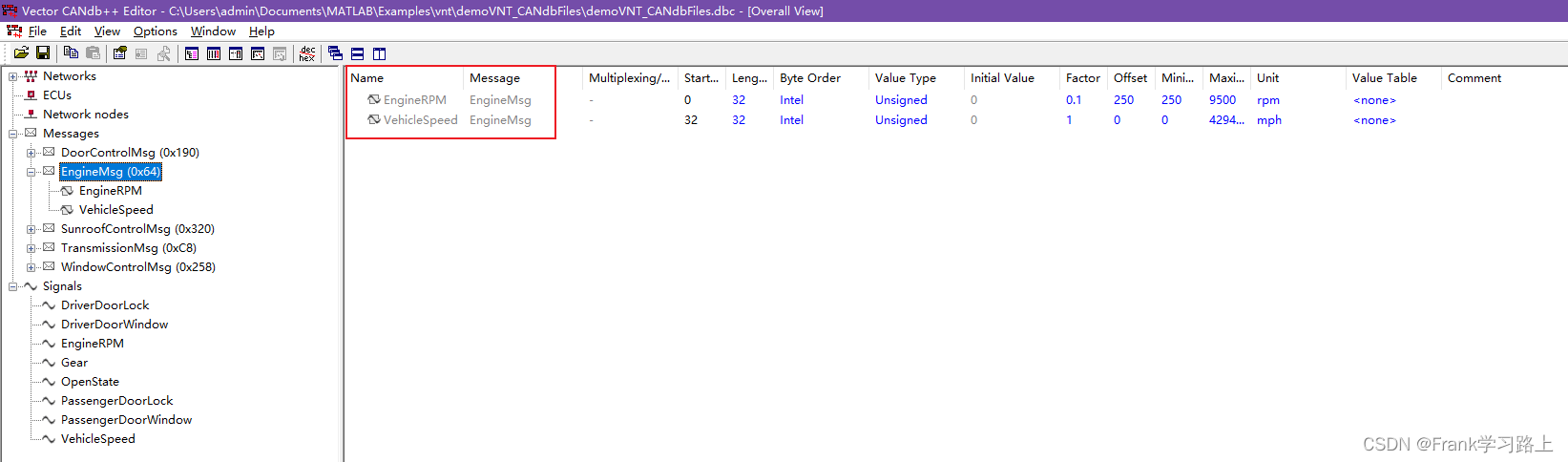
использовать canDatabase открыть файл demoVNT_CANdbFiles.dbc,Этот документ приведен в качестве официального примера.,Вы также можете использовать свой собственный документ DBC. Дальше в основном используем EngineMsg Это сообщение:
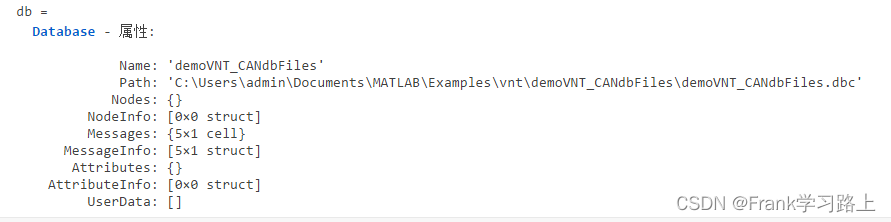
db = canDatabase("demoVNT_CANdbFiles.dbc")Matlab читает dbc следующим образом:
Проверьте свойство Messages, чтобы увидеть имена всех сообщений, определенных в этом файле (в соответствии с CANoe):
db.Messages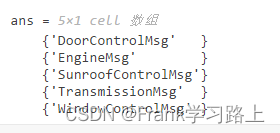
Просмотр информации о сообщении
использовать messageInfo Посмотреть сообщение EngineMsg информация, включая идентификатор, длину данных и список сигналов.
messageInfo(db, "EngineMsg")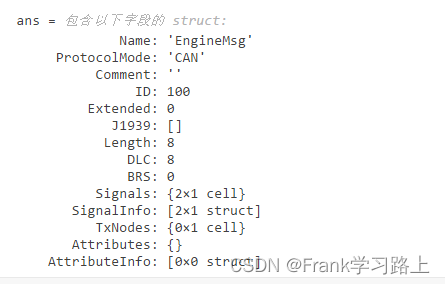
Просмотр информации о сигнале
использовать signalInfo Посмотреть сообщение EngineMsg средний сигнал EngineRPM Информация, включая тип, порядок байтов, размер и коэффициенты, используемые для преобразования исходного сигнала в физическую величину.
signalInfo(db, "EngineMsg", "EngineRPM")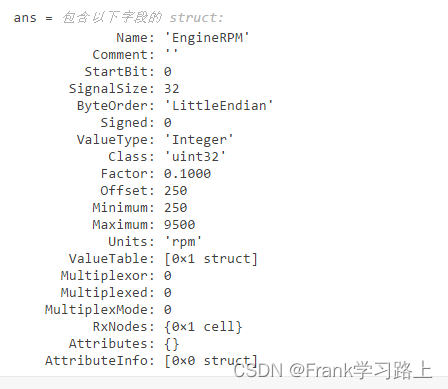
Создание сообщений с использованием определений базы данных
Создайте новое сообщение, указав DBC и имя сообщения, которое нужно применить. Сигналы CAN в этом сообщении выражаются в инженерных единицах в дополнение к байтам необработанных данных.
msgEngineInfo = canMessage(db, 'EngineMsg')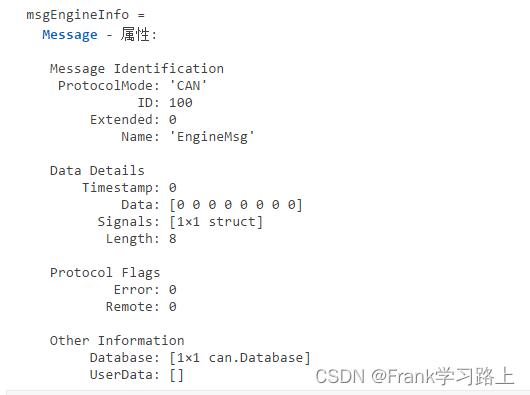
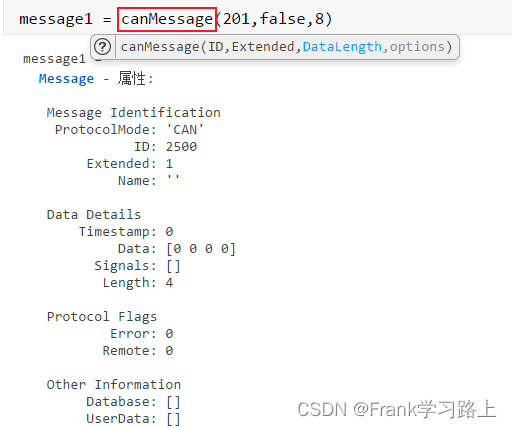
также,canMessage Вы также можете создать сообщение с указанным идентификатором:
Просмотр информации о сигнале нового сообщения
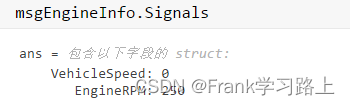
Просматривайте значения сигналов для новых сообщений и можете напрямую записывать и читать эти сигналы для упаковки и распаковки данных в сообщении.
msgEngineInfo.SignalsНачальные значения следующие:
Изменение информации о сигнале
Напишите непосредственно в сигнал, чтобы изменить его значение. Вы можете увидеть изменения в Data:
msgEngineInfo.Signals.EngineRPM = 5500.25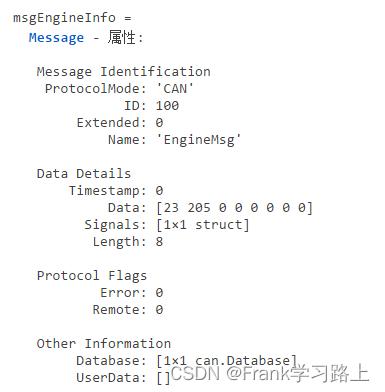
Считайте текущее значение сигнала:
msgEngineInfo.Signals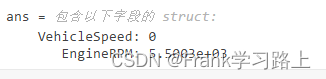
При записи непосредственно в сигнал он автоматически преобразуется и используетсябаза. данных Определение упаковки в сообщенияданные(Десятичный-шестнадцатеричный)середина。Напишите нижеVehicleSpeedData:
msgEngineInfo.Signals.VehicleSpeed = 70.81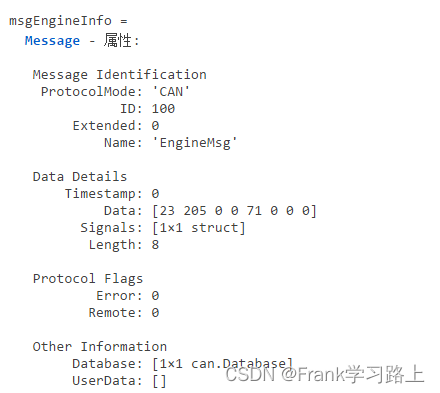
Просмотр текущих сигналов:
msgEngineInfo.Signals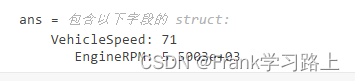
Получать сообщения с информацией о базе данных
Подключите базу данных к CAN канал, канал сообщение для автоматического преобразования базы Определение данных применяется к входящим сообщениям. база данные анализируют только определенные сообщения. Остальные сообщения принимаются в исходном виде.
rxCh = canChannel("MathWorks", "Virtual 1", 2);
rxCh.Database = db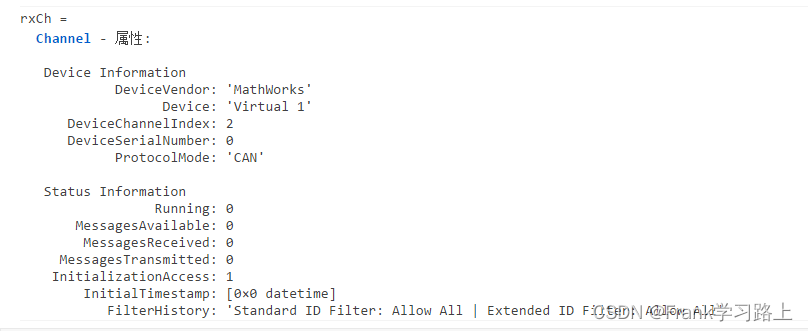
Получить сообщение
Начать канал,Создайте несколько потоков сообщений(случайный),Затем раскодируйте сообщение в Получить сообщение. И посмотрите на первые несколько строк полученного сообщения.
start(rxCh);
generateMsgsDb();
rxMsg = receive(rxCh, Inf, "OutputFormat", "timetable");
rxMsg(1:15, :)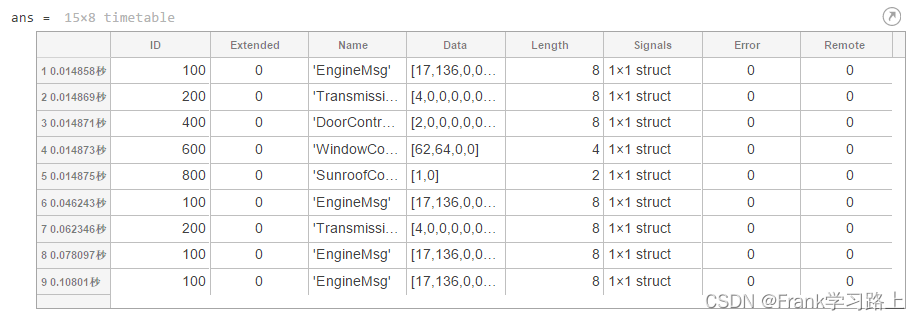
Остановите принимающий канал и удалите его из рабочей области.
stop(rxCh);
clear rxChПроверьте полученные сообщения
Проверьте полученные сообщения Используйте вместеDBCдекодирование:
rxMsg(1, :)
rxMsg.Signals{1}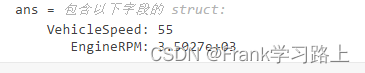
Извлечь все экземпляры указанного сообщения
Извлеките все экземпляры сообщения и просмотрите первые несколько экземпляров этого конкретного сообщения.
allMsgEngine = rxMsg(strcmpi('EngineMsg', rxMsg.Name), :);
allMsgEngine(1:15, :)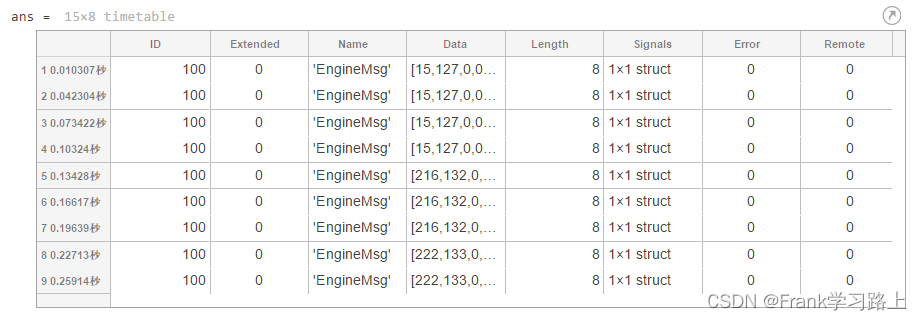
Отрисовка физических значений сигналов (парсинг сообщений)
использовать canSignalTimetable Переупакуйте данные сигнала в сообщении в расписание сигналов и просмотрите первые несколько строк расписания сигналов.
signalTimetable = canSignalTimetable(rxMsg, 'EngineMsg');
signalTimetable(1:15, :)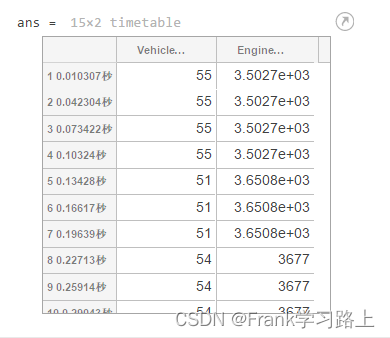
Постройте сигнал как функцию времени:
plot(signalTimetable.Time, signalTimetable.VehicleSpeed)
title('Vehicle Speed from EngineMsg', 'FontWeight', 'bold')
xlabel('Timestamp')
ylabel('Vehicle Speed')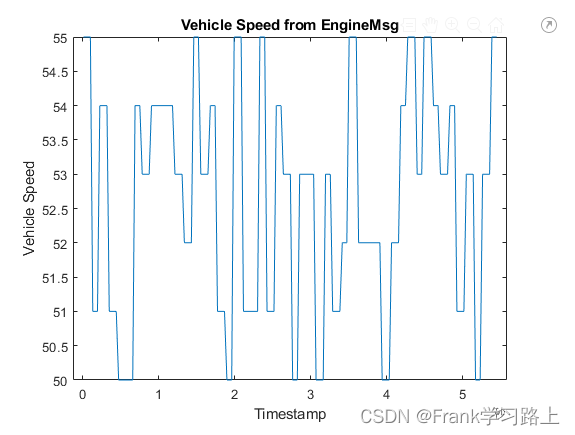
Кроме того, значение сообщения или семафора можно произвольно изменять в рабочей области.
Закрыть файл DBC
Удалите переменные файла DBC из рабочей области и закройте доступ к файлу DBC.
clear dbВот и все.



Углубленный анализ переполнения памяти CUDA: OutOfMemoryError: CUDA не хватает памяти. Попыталась выделить 3,21 Ги Б (GPU 0; всего 8,00 Ги Б).

[Решено] ошибка установки conda. Среда решения: не удалось выполнить первоначальное зависание. Повторная попытка с помощью файла (графическое руководство).

Прочитайте нейросетевую модель Трансформера в одной статье

.ART Теплые зимние предложения уже открыты

Сравнительная таблица описания кодов ошибок Amap

Уведомление о последних правилах Points Mall в декабре 2022 года.

Даже новички могут быстро приступить к работе с легким сервером приложений.

Взгляд на RSAC 2024|Защита конфиденциальности в эпоху больших моделей

Вы используете ИИ каждый день и до сих пор не знаете, как ИИ дает обратную связь? Одна статья для понимания реализации в коде Python общих функций потерь генеративных моделей + анализ принципов расчета.

Используйте (внутренний) почтовый ящик для образовательных учреждений, чтобы использовать Microsoft Family Bucket (1T дискового пространства на одном диске и версию Office 365 для образовательных учреждений)

Руководство по началу работы с оперативным проектом (7) Практическое сочетание оперативного письма — оперативного письма на основе интеллектуальной системы вопросов и ответов службы поддержки клиентов

[docker] Версия сервера «Чтение 3» — создайте свою собственную программу чтения веб-текста

Обзор Cloud-init и этапы создания в рамках PVE

Корпоративные пользователи используют пакет регистрационных ресурсов для регистрации ICP для веб-сайта и активации оплаты WeChat H5 (с кодом платежного узла версии API V3)

Подробное объяснение таких показателей производительности с высоким уровнем параллелизма, как QPS, TPS, RT и пропускная способность.

Удачи в конкурсе Python Essay Challenge, станьте первым, кто испытает новую функцию сообщества [Запускать блоки кода онлайн] и выиграйте множество изысканных подарков!

[Техническая посадка травы] Кровавая рвота и отделка позволяют вам необычным образом ощипывать гусиные перья! Не распространяйте информацию! ! !

[Официальное ограниченное по времени мероприятие] Сейчас ноябрь, напишите и получите приз

Прочтите это в одной статье: Учебник для няни по созданию сервера Huanshou Parlu на базе CVM-сервера.

Cloud Native | Что такое CRD (настраиваемые определения ресурсов) в K8s?

Как использовать Cloudflare CDN для настройки узла (CF самостоятельно выбирает IP) Гонконг, Китай/Азия узел/сводка и рекомендации внутреннего высокоскоростного IP-сегмента

Дополнительные правила вознаграждения амбассадоров акции в марте 2023 г.

Можно ли открыть частный сервер Phantom Beast Palu одним щелчком мыши? Супер простой урок для начинающих! (Прилагается метод обновления сервера)

[Играйте с Phantom Beast Palu] Обновите игровой сервер Phantom Beast Pallu одним щелчком мыши

Maotouhu делится: последний доступный внутри страны адрес склада исходного образа Docker 2024 года (обновлено 1 декабря)

Кодирование Base64 в MultipartFile

5 точек расширения SpringBoot, супер практично!

Глубокое понимание сопоставления индексов Elasticsearch.

15 рекомендуемых платформ разработки с нулевым кодом корпоративного уровня. Всегда найдется та, которая вам понравится.
