Как FX5U управляет серво/шаговым приводом? Взгляните и узнайте о встроенной функции позиционирования
IQ-FрядPLCОбеспечивает мощные встроенные возможности позиционирования импульсов.,для удовлетворения различных потребностей приложений. В серию входят:
Простая модель:FX5S
Модель входа:FX5UJ
Высококачественные модели:FX5U/5UC

По сравнению с ПЛК серии FX3, ПЛК серии IQ-F имеет значительно улучшенные функции. Особенно с точки зрения функции позиционирования FX5 не только более мощный, но также упрощает написание программ и настройку посредством параметризации. Благодаря простой настройке параметров и написанию программы пользователи могут легко реализовать функцию позиционирования.
В этой статье основное внимание будет уделеноIQ-FрядPLCсерединаFX5Модель с точки зрения функции позиционированияНастройка параметров, введение инструкций и написание программысодержание,Помогите пользователям лучше освоить и применить эту функцию (инструкции по позиционированию серии FX5 можно скачать в конце статьи).
1. Настройки параметров
[Параметр]-[Параметры модуля]-[Высокоскоростной I0]-[Позиционирование]-[Детальные настройки]
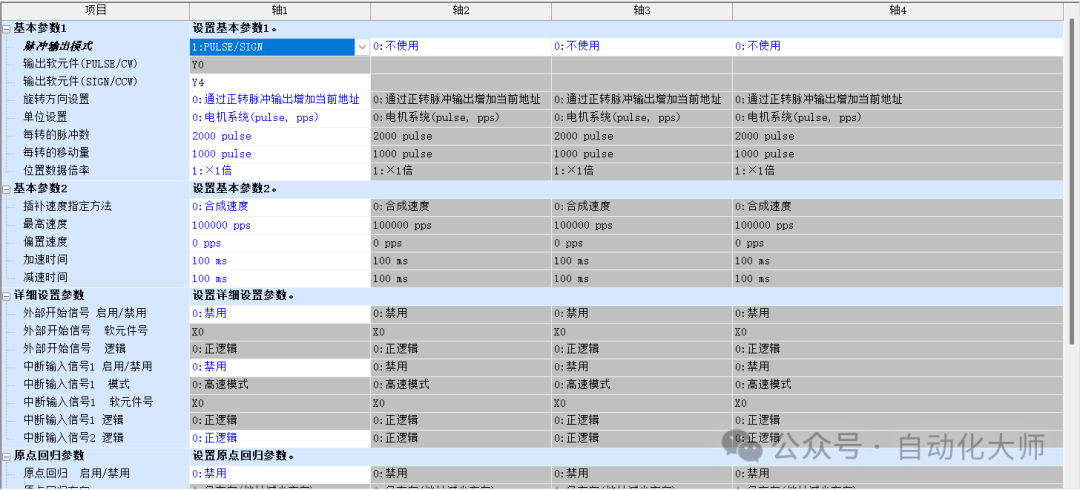
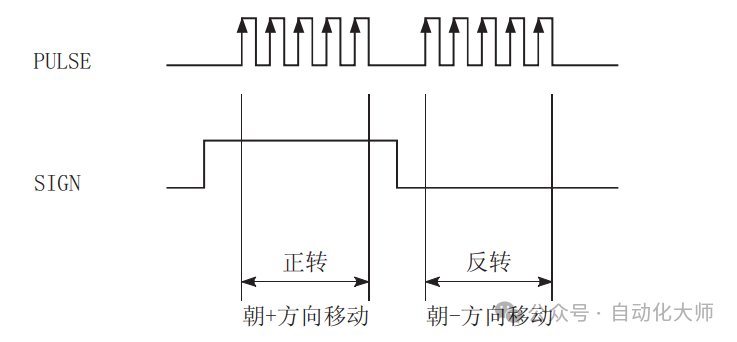
Импульсный режим: PULSE/SIGN Это метод направления + импульса. Работа контролируется высокоскоростным импульсным выходом, а направление работы контролируется ЗНАКОМ.
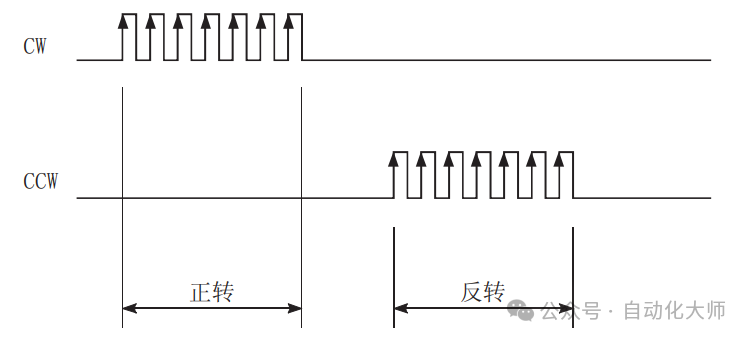
CW/CCW
Используйте двойной импульс, занимающий две точки высокоскоростного импульсного выхода. При вращении вперед выводится импульс вперед (PULSE F), а при вращении назад – импульс назад (PULSE R).
Количество импульсов на оборот,Это должно соответствовать настройкам сервопривода.
Остальные параметры можно настроить в соответствии с потребностями.
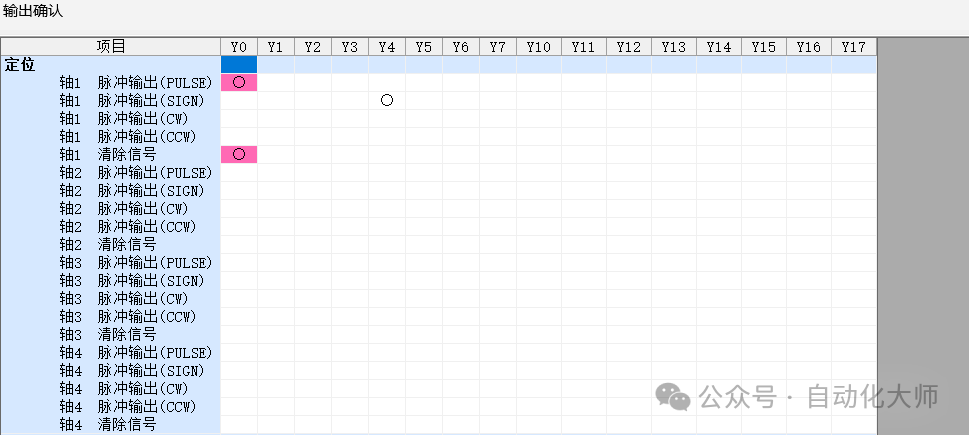
наконец,Можно нажать[Вывод подтверждения],Подтвердите используемый выходной сигнал.
2. Знакомство с инструкцией
Инструкции позиционирования FX5 разделены на операнды FX5 и операнды, совместимые с FX3 (доступны только встроенные методы позиционирования).
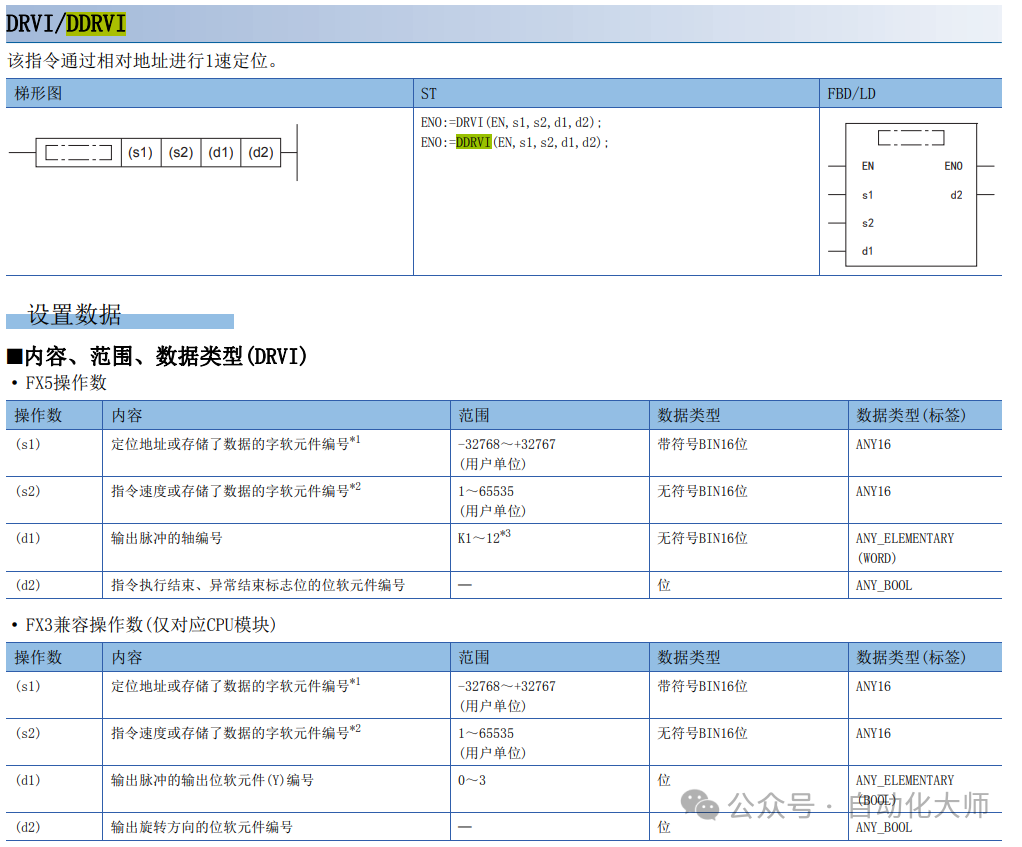
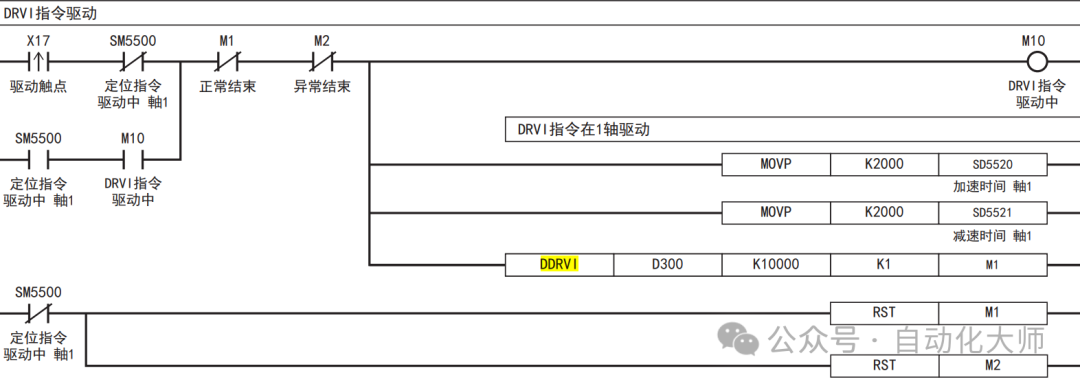
DDRVI:
Выполните операцию относительного 1-скоростного позиционирования на сервооси.
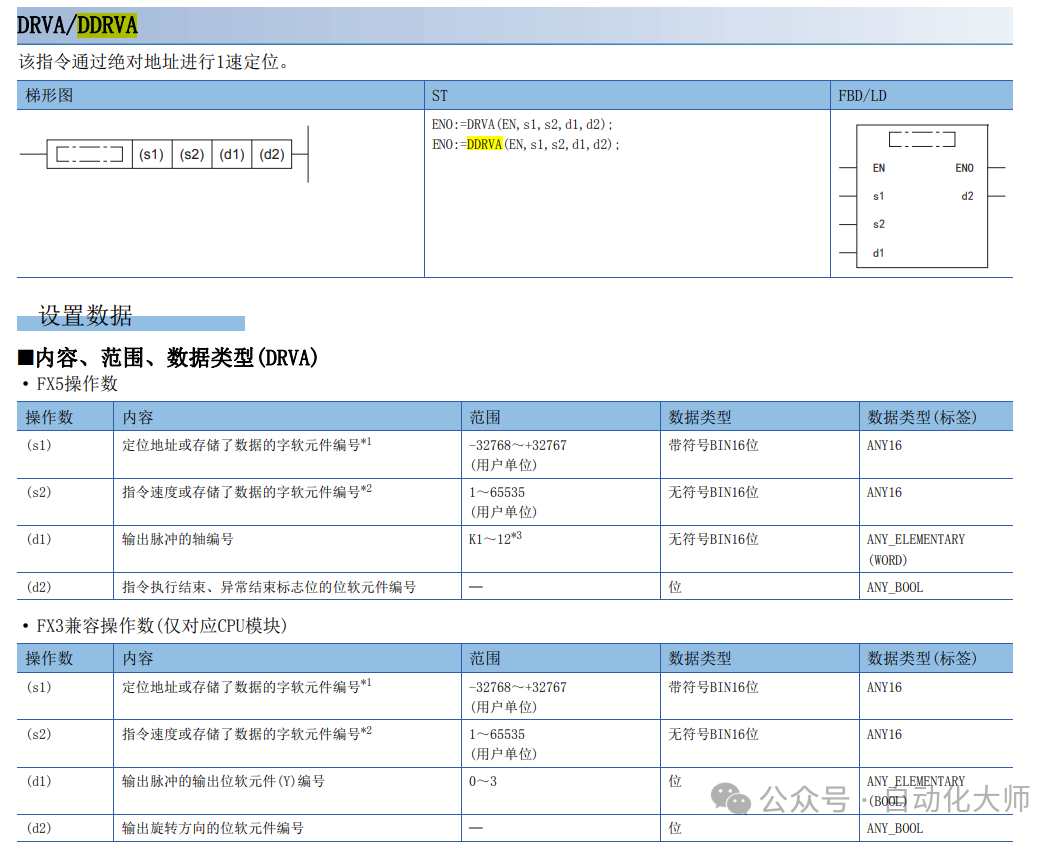
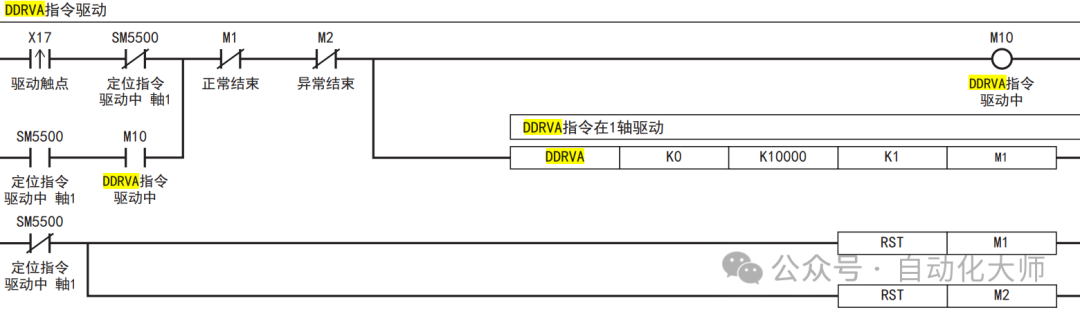
DDRVA:
Выполните операцию относительного 1-скоростного позиционирования на сервооси.
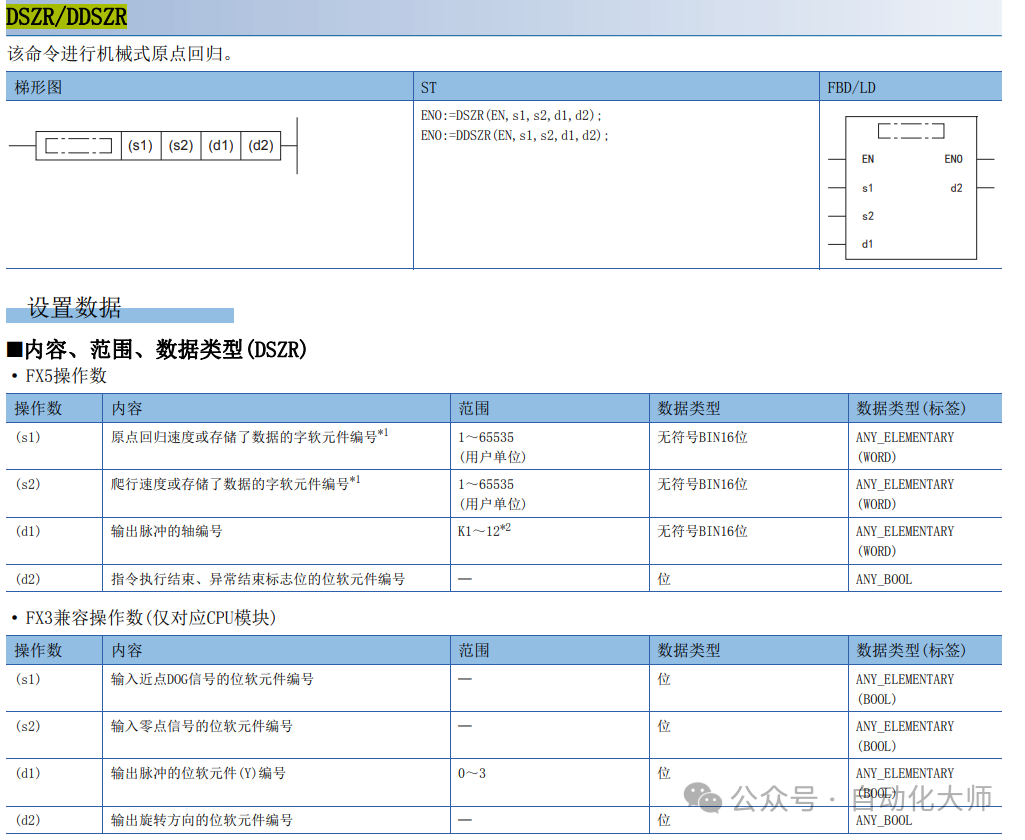
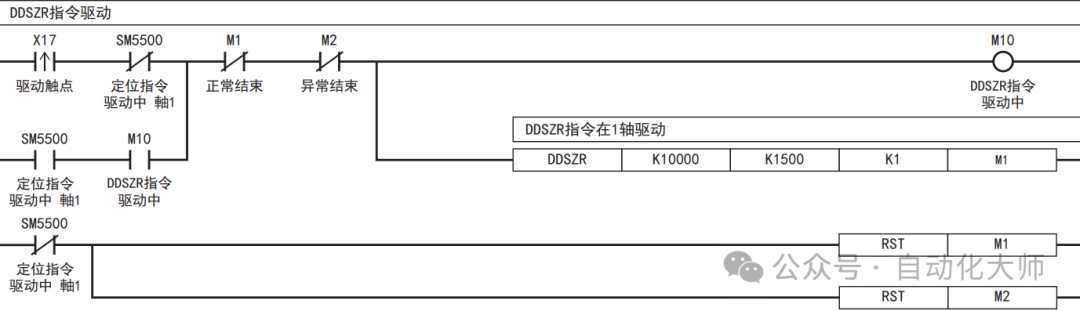
Вернуться к началу:
Используйте DSZR/DDSZR для механического возврата в исходное положение. Логику возврата в исходное положение см. в главе «Программирование».
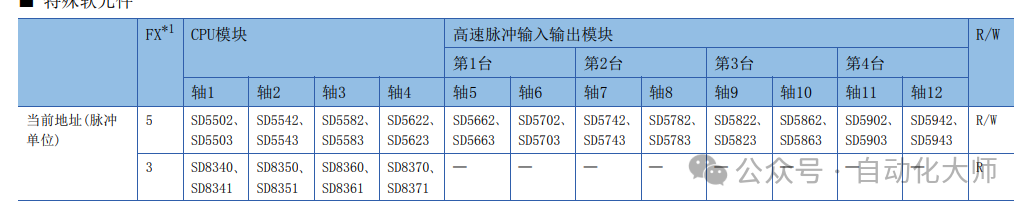
Изменить текущее местоположение:
Можно использоватьHCMOV/DHCMOVИзменить текущий адресный регистр,После модификации,Автоматически изменит текущее местоположение
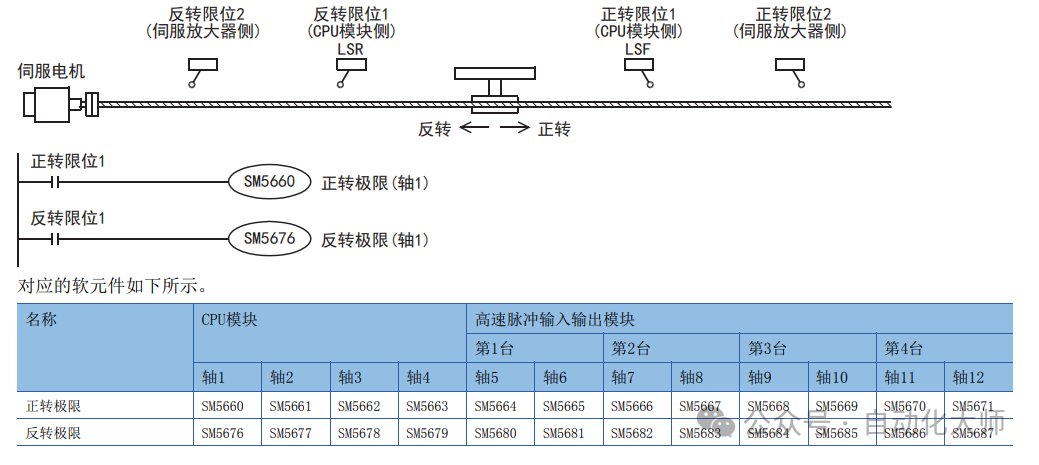
Положительные и отрицательные пределы:
Функции положительного и отрицательного ограничения встроенного позиционирования ПЛК можно использовать для подключения внешнего сигнала ограничения ко входу ПЛК.
3. Программирование
Обычно, когда мы выполняем управление движением для инкрементных систем, нам необходимо выполнить операции возврата в исходное положение.
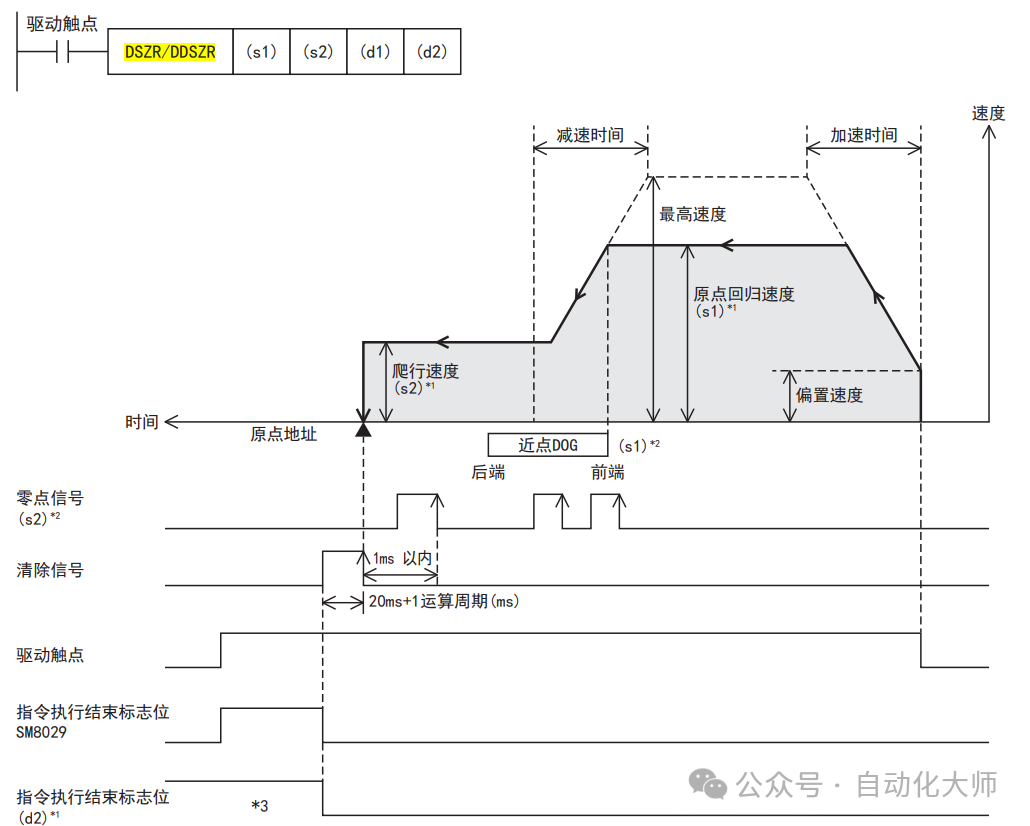
Логика возврата происхождения следующая:
1. Когда контакт привода включен, импульсы выдаются и ускоряются до скорости смещения.
2. После достижения исходной скорости возврата поддерживайте эту скорость.
3. Обнаружьте приближающуюся собаку и замедлите движение.
4. После снижения скорости медленного движения продолжайте медленное движение.
5. После выключения DOG вблизи точки определите нулевой сигнал и остановите импульс.
абсолютное позиционирование
Абсолютное позиционирование относится к методу позиционирования, который использует абсолютный адрес системы координат в качестве ссылки. Указанный адрес позиционирования — это адрес в системе координат.
относительное позиционирование
относительное Позиционирование означает, что в качестве системы отсчета используется текущая позиция, а указанный адрес позиционирования является текущей позицией ± адрес позиционирования.



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
