BIM и облако точек: масштабная реконструкция здания на основе облака точек с воздуха LiDAR.
Название: City3D: крупномасштабная реконструкция зданий с помощью облаков точек с помощью LiDAR
В ролях: Цзинь Хуан, Янтьен Стотер, Рави Питерс и Лянлян Нань.
Редактор: Облако точек PCL
Источник: arXiv2023
краткое содержание
В данной статье предлагается полностью автоматический метод.,Для плотной 3D-архитектуры. Модель из крупномасштабных облаков точек с воздуха LiDAR.,Основная проблема городской реконструкции с помощью облаков точек с воздуха LiDAR заключается в том, что вертикальные стены часто отсутствуют. Однако городские здания обычно состоят из плоских крыш и вертикальных стен, соединенных с землей.,Поэтому предлагается метод определения вертикальных стен непосредственно на основе данных.,Сделав предположения о плоских сегментах крыш и стен.,Мы предполагаем, что плоскость поверхности здания,И используйте реконструкциярамку расширенной полигональной поверхности, основанную на предположениях и выборе, чтобы получить окончательную Модель. В частности, вводится новый энергетический термин, призванный способствовать предпочтению крыш.,и ввел два дополнительных жестких ограничения на этапе оптимизации.,для обеспечения правильной топологии и расширенных возможностей детального восстановления.。Эксперименты с различными крупномасштабными воздушными облаками точек LiDAR показывают, что этот метод превосходит существующие методы с точки зрения точности и надежности реконструкции. Кроме того, с помощью этого метода был создан новый набор данных, содержащий 20 000 облаков точек и 3D-модели реальных зданий. Мы считаем, что этот набор данных может способствовать исследованиям городской реконструкции на основе облаков точек с воздуха LiDAR и использованию 3D-городов в городских моделях. исследовать.
Основные вклады
Крупномасштабная реконструкция города с помощью облаков точек с воздуха LiDAR сталкивается со следующими проблемами:
- Построение сегментации экземпляров. В городских сценах существует большое разнообразие объектов.,например, здания, деревья, городская мебель и динамические объекты (например, транспортные средства и пешеходы),Хаотичный характер городских сцен создает серьезные проблемы при идентификации и изоляции отдельных зданий из массивных облаков точек.,в последние годы привлекло значительное внимание.
- данные неполные. Из-за ограниченного положения и траектории движения аэросканеров некоторые важные конструкции (например, вертикальные стены) обычно не фиксируются в облаках точек воздушного LiDAR.
- Сложная структура. Реальные здания демонстрируют сложные конструкции и разные стили.,Однако,Извлечение информации о структуре из разреженных и зашумленных облаков точек ограничено.,Это в дальнейшем приводит к неоднозначности в получении топологически корректной Модели поверхности.
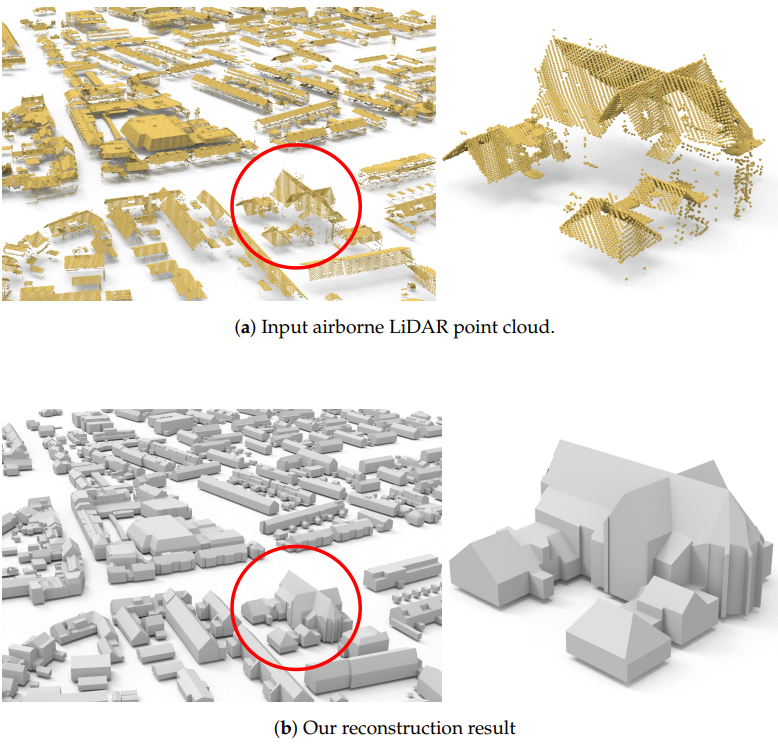
Рисунок 1. Результаты всех зданий, автоматически реконструированных на основе большой сцены в наборе данных AHN3.
Эта работа решает вышеуказанные проблемы, во-первых, используя все более доступные векторизованные данные о силуэтах зданий для решения проблемы сегментации экземпляров зданий для изоляции отдельных зданий, а во-вторых, используя предварительные знания о строительных конструкциях для определения их вертикальных плоскостей. Основываясь на том факте, что вертикальные плоскости в облаках точек воздушного LiDAR часто представляют собой стены, соединяющие сегментированные плоские крыши с землей, мы предлагаем алгоритм вывода вертикальных плоскостей из неполных облаков точек. Наш метод позволяет расширять фасады непосредственно из заданного контура здания. Реконструкция поверхности, наконец, выполняется путем введения предполагаемых вертикальных плоскостей в качестве ограничений в существующие структуры реконструкции полигональной поверхности, основанные на гипотезах и выборе. Структура способствует хорошей подгонке и плотности входного облака точек и обеспечивает многообразие конечной модели (см. Рисунок 1). Основные положения этой статьи включают в себя:
- мощная рамка,Для полностью автоматизированной реконструкции крупномасштабных городских зданий из облаков точек с воздуха LiDAR.
- Расширение существующей гипотезы и выбранный метод реконструкции поверхностей зданий.,Поощряйте предпочтения на крыше, вводя новые энергетические термины,И вводятся два дополнительных жестких ограничения для обеспечения правильной топологии и улучшения возможностей восстановления деталей.
- Новый метод построения вертикальных плоскостей на основе облаков точек с воздуха LiDAR, в котором мы представляем оптимальный метод транспортировки для извлечения полилиний из 2D-контуров границ.
- Новая коллекция данных, содержащая 20 000 облаков точек реальных зданий и реконструкция поверхностей Модель.
Основное содержание
Обзор
Предлагаемый метод принимает исходное облако точек LiDAR большой городской сцены и соответствующие очертания зданий в качестве входных данных и выводит двумерное многообразие и замкнутую трехмерную многоугольную модель зданий на сцене. На рисунке 2 показаны результаты. предлагаемый метод. Во-первых, он извлекает облака точек отдельных зданий, проецируя все точки на плоскость земли и собирая точки, расположенные внутри каждого полигона контура здания. Затем мы реконструируем компактную полигональную модель из облака точек каждого здания. Реконструкция отдельного здания основана на системе PolyFit, основанной на гипотезах и выборе [20], которая используется для реконструкции общих сегментированных плоских объектов из набора плоских сегментов, извлеченных из облаков точек. В этом методе используются не только плоские сегменты, извлеченные непосредственно из облака точек, но и вертикальные плоскости, полученные из облака точек. На основе этих двух типов плоских примитивов мы делаем предположения о лицах здания, выбираем лучшее подмножество граней посредством оптимизации и, наконец, получаем модель. Разница между методом этой статьи и PolyFit заключается в следующем:
(1) Этот метод специально используется для реконструкции городских зданий с использованием вертикальных плоскостей в качестве жестких ограничений. С этой целью мы предлагаем новый алгоритм для определения вертикальных плоскостей зданий, которые часто отсутствуют в облаках точек LiDAR.
(2) В процессе оптимизации вводятся новый энергетический термин предпочтения крыши и два дополнительных жестких ограничения, чтобы гарантировать правильную топологию и улучшенное восстановление деталей.
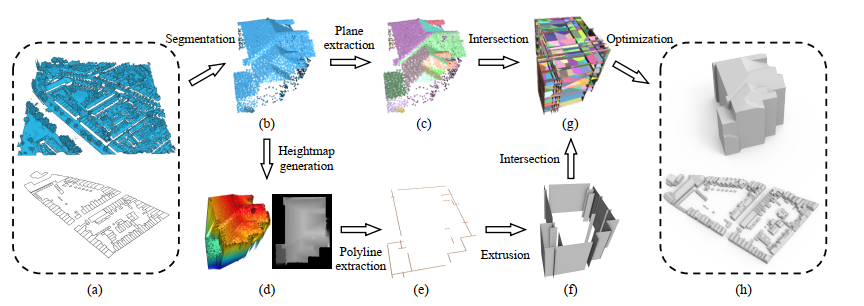
Рисунок 2. Схема предлагаемого метода (для иллюстрации рабочего процесса выбрано только одно здание). (a) Введите облако точек и соответствующие данные контура. (б) Здания, извлеченные из входного облака точек по их силуэтным полигонам. (c) Плоские сегменты, извлеченные из облака точек. (d) Карта высот, созданная на основе TIN (справа), TIN, окрашенный в цвет поля высоты (слева). (e) Полилиния, извлеченная из карты высот. (f) Вертикальная плоскость, экстраполированная из предполагаемой ломаной линии. (g) Гипотетическая поверхность здания, созданная с использованием извлеченных плоскостей и предполагаемых вертикальных поверхностей. (h) Окончательная модель, полученная путем оптимизации.
Сделайте вывод о вертикальной плоскости
В облаках точек LiDAR важные конструкции зданий, такие как вертикальные стены, часто упускаются из виду из-за ограниченного позиционирования и траекторий движения сканера. Напротив, поверхности крыш обычно фиксируются лучше, и мы надеемся, что сможем их захватить. их из включенных недостающих стен выводятся из доступного облака точек поверхности крыши. Мы делаем вывод, что вертикальные плоскости представляют собой не только наружные стены, но и вертикальные стены в контуре здания. Чтобы добиться этого путем создания 2D растеризованных карт высот из контуров со значительными изменениями значений высоты, мы предлагаем оптимальный метод переноса для извлечения замкнутых полилиний из контуров и последующей экстраполяции этих полилиний для получения. Процесс вывода вертикальной стены и вертикальной плоскости показан на рисунке. 2д-ф. Извлеченные полилинии оптимизируются с помощью правил, кластеризации и множественных корректировок. После повышения регулярности вертикальную поверхность здания можно получить путем удлинения регуляризованных полилиний по вертикали. Эффект повышенной регулярности показан на рисунке 3, из которого мы сделали. Было замечено, что это значительно улучшает структурную регулярность и уменьшает сложность силуэта здания.
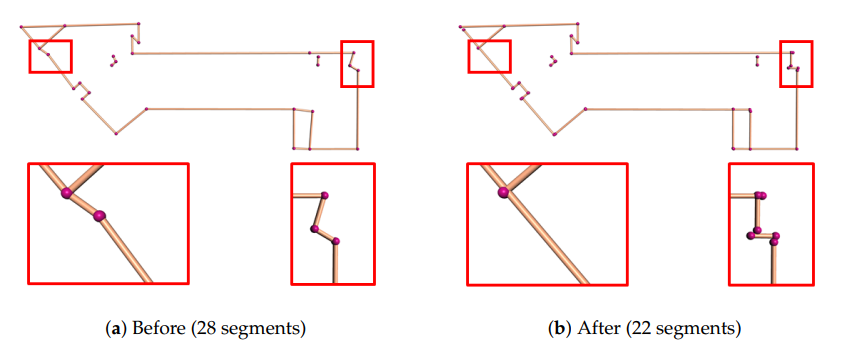
Рисунок 3. Влияние улучшения регулярности на основе кластеризации на вывод полилиний на вертикальных стенах. (а) До повышения регулярности. (б) После усиления регулярности.
реконструкция
Реконструкция поверхности включает в себя два типа плоских примитивов, а именно вертикальную плоскость, полученную на предыдущем шаге, и плоскость крыши, извлеченную непосредственно из облака точек. В отличие от PolyFit, который вычисляет попарное пересечение всех плоских примитивов для вывода поверхности, мы используем только плоскость крыши, чтобы вычислить попарное пересечение, а затем обрезать полученную грань по внешней вертикальной плоскости. Этот процесс гарантирует, что границы крыши реконструируемого здания могут быть точно соединены с предполагаемыми вертикальными поверхностями стен. Кроме того, поскольку реконструируемый объект представляет собой здание в реальном мире, в исходную формулу вводятся энергетический термин предпочтения крыши и набор жестких ограничений, специально разработанных для зданий. Это ограничение устраняет неоднозначность, когда две гипотетические грани примерно копланарны и близки друг к другу, тем самым сохраняя более мелкие геометрические детали. Эффект этого ограничения продемонстрирован на рисунке 4.
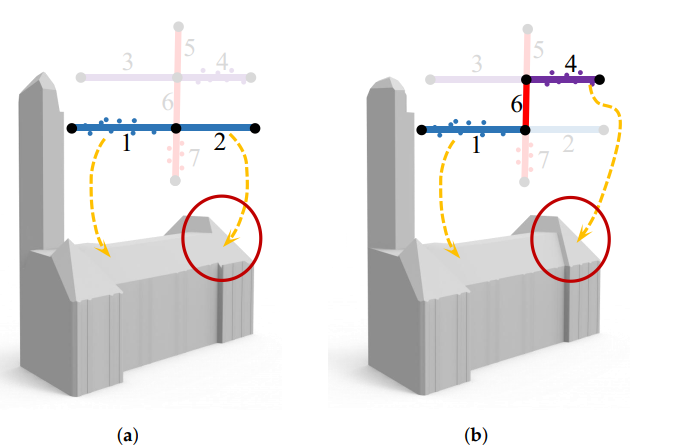
Рисунок 4. Влияние поверхностных априорных ограничений
Эксперименты и анализ
Наш метод реализован на C++ с использованием CGAL, а все эксперименты проводятся на настольном компьютере, оснащенном процессором AMD Ryzen Threadripper 1920X с тактовой частотой 3,5 ГГц и 64 ГБ памяти. Наш метод протестирован на трех крупномасштабных наборах данных городских облаков точек, содержащих более 20 000 зданий.
На рисунках 1 и 5 показаны результаты 3D-реконструкции всех зданий в двух больших сценах из набора данных AHN3. Реконструированная модель здания на рисунке 1 представляет собой упрощенную полигональную сетку со средним количеством граней 34. Чтобы лучше продемонстрировать качество наших реконструированных моделей зданий, мы представляем на рисунке 6 набор отдельных зданий, реконструированных на основе трех наборов тестовых данных. Из этих визуальных результатов видно, что, несмотря на разнообразные конструкции зданий разных стилей, входные облака точек с разной плотностью и разными уровнями шума, выбросы и недостающие данные, метод успешно позволил получить визуальные разумные результаты реконструкции. Эти эксперименты демонстрируют успех нашего метода в определении вертикальных граней зданий из облаков точек с воздуха LiDAR и эффективность включения этих граней в 3D-реконструкции городских зданий.

Рисунок 5. Результаты реконструкции большой сцены в наборе данных AHN3.
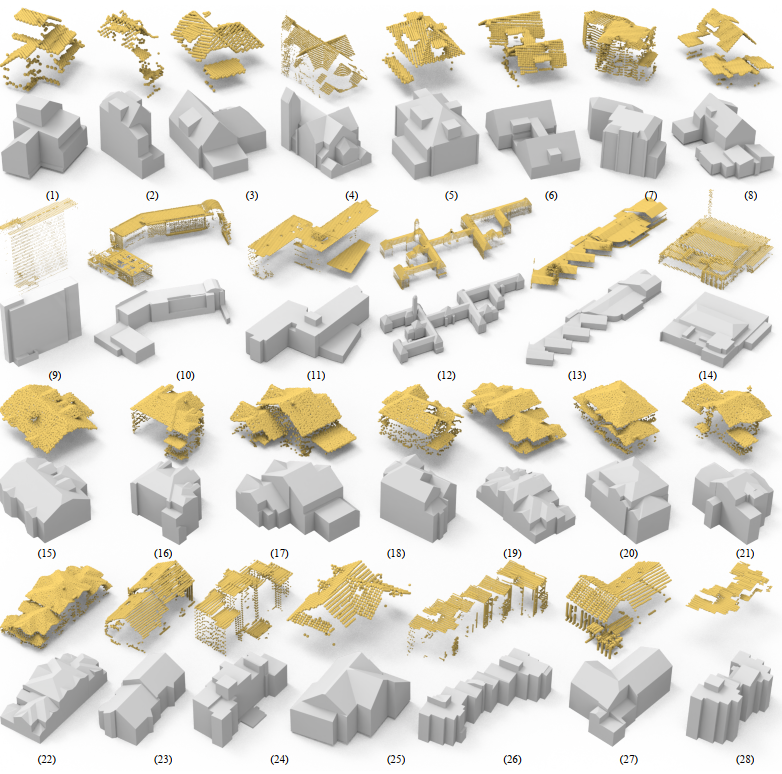
Рисунок 6. Результаты реконструкции набора зданий из разных наборов данных, где (1–14) — из набора данных AHN3, (15–22) — из набора данных DALES (23–28) — из набора данных Vaihingen.
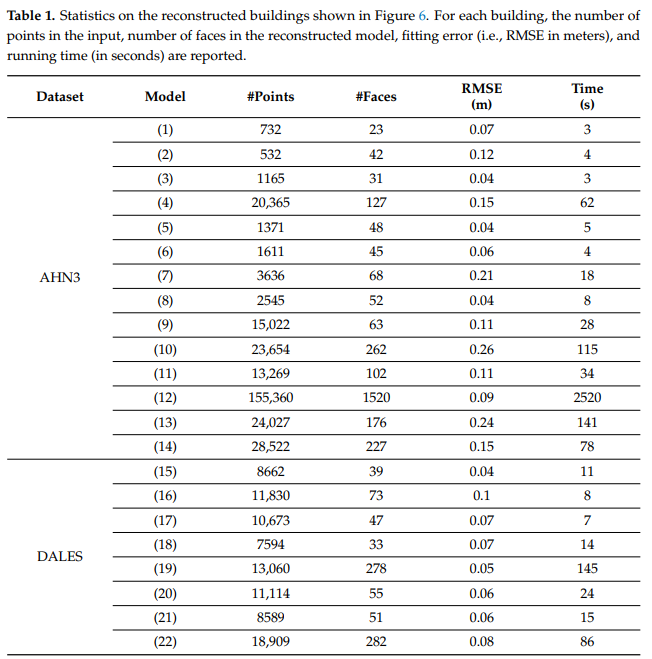
В таблице 1 мы приводим статистику количественных результатов для зданий, показанных на рисунке 6. Видно, что наш метод обеспечивает хорошую точность реконструкции, т.е. среднеквадратическую ошибку (RMSE) для всех зданий. Между 0,04 метра и 0,26 метра это очень перспективен для 3D-реконструкции реальных зданий из шумных и разреженных облаков точек LiDAR. Как видно из последовательности граней в Таблице 1, наш результат представляет собой упрощенную полигональную модель, которая более плотна, чем обычно используемые методы (такие как метод реконструкции поверхности Пуассона).
Количество обнаруженных плоских фрагментов в зависимости от времени работы при реконструкции здания.
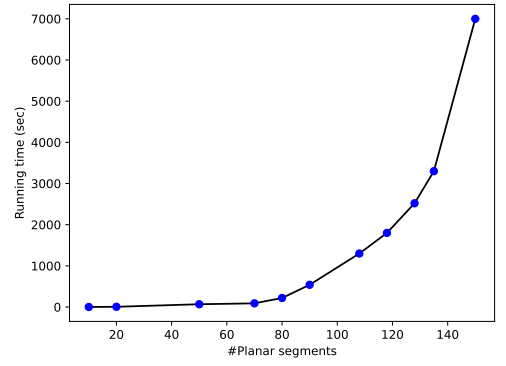
На рис. 7 показано время выполнения реконструкции здания по количеству обнаруженных плоских фрагментов.
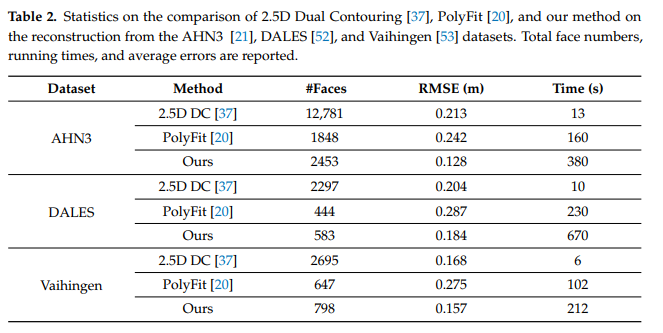
Наш метод сравнивается с двумя успешными методами с открытым исходным кодом, а именно 2.5D Dual Contouring (специально для городской архитектуры) и PolyFit (для общих сегментированных плоских объектов), в наборах данных AHN3, DALES и Vaihingen. Сравните, как показано ниже.
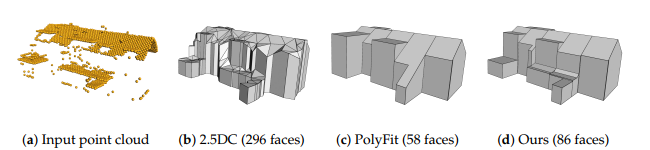
В табл. 2 представлена статистика сравнения, из которой видно, что модель здания, восстановленная нашим методом, имеет наибольшую точность. С точки зрения времени работы наш метод медленнее, чем два других метода, но все же приемлем для практического применения (в среднем 4,9 секунды на здание).
Также было проведено обширное количественное сравнение с 3D-моделями зданий из BAG3D, общедоступной 3D-платформы городов, которая предоставляет 3D-модели городских зданий на уровне LoD2. Для этого сравнения мы выбрали четыре различных области из BAG3D, в общей сложности содержащих 1113 зданий. На рисунке 9 мы показываем визуальное сравнение, из которого видно, что наша модель более регулярна.
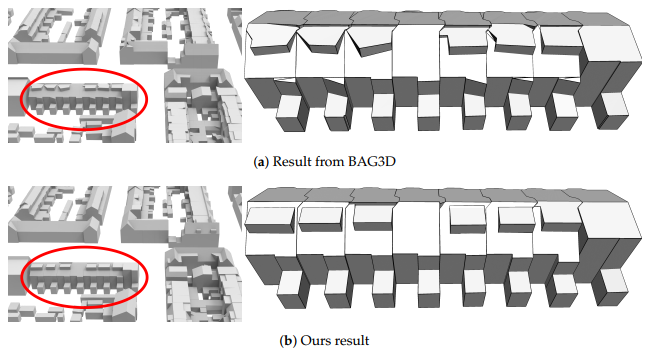
Рисунок 9. Визуальное сравнение с BAG3D, показывающее здание из Таблицы 3.
Количественные результаты представлены в таблице 3, из которой видно, что наши результаты имеют более высокую точность.
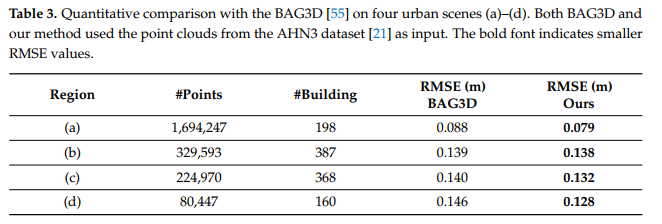
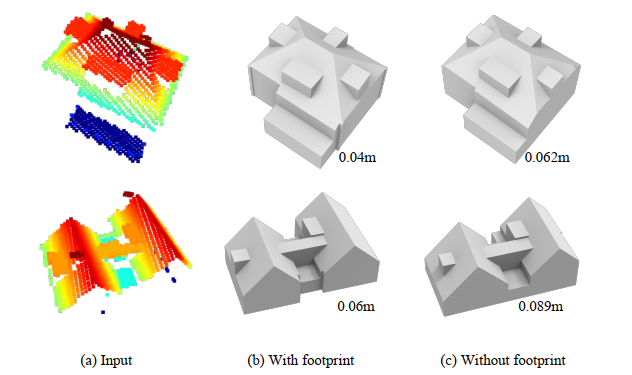
Рисунок 10. Сравнение реконструкций двух зданий из набора данных AHN3 с использованием (б) и без (в) данных о площади здания. Числа под каждой моделью представляют собой среднеквадратическую ошибку (RMSE), использование экстраполированной вертикальной плоскости немного увеличивает ошибку реконструкции.

Рисунок 11. Реконструкция по облаку точек с воздуха. В этих облаках точек вертикальные стены можно извлечь из облака точек и использовать непосредственно для реконструкции, пропуская таким образом этап вывода вертикальной плоскости.
Подвести итог
В этой статье предлагается полностью автоматизированный метод 3D-рендеринга крупномасштабных городских зданий из облаков точек с воздуха LiDAR.,Предлагаются методы определения вертикальных плоскостей зданий, которые часто отсутствуют в облаках точек LiDAR.,В процессе реконструкции,Предполагаемая вертикальная плоскость играет две разные роли.,Внешние вертикальные плоскости становятся непосредственной частью фасада здания.,при этом внутренние вертикальные плоскости формируются путем разделения плоскостей крыши в соответствующих местах и формирования необходимых внутренних стен.,Расширенные детали здания,Наш метод также можно комбинировать с реконструкцией заданной площади здания.,Использовать информацию о следах,Они будут использованы для возведения наружных стен Модели.,Предполагаемая внутренняя плоскость Расширенные детали здания,Обширные эксперименты с различными наборами данных показывают, что,Удаление вертикальной плоскости из облаков точек LiDAR с воздуха — эффективная стратегия для зданий.,А предлагаемый энергетический термин с приоритетом крыши и новые жесткие ограничения обеспечивают топологически правильные и точные результаты решения. Текущая рамка использует только плоские примитивы.,Достаточно для реконструкция большинства городских зданий. Однако,Здания с изогнутыми поверхностями все еще существуют в реальном мире,И наша текущая реализация не может справиться с этой ситуацией. Поэтому наши предположения и стратегии выбора носят общий характер.,Может быть расширен для обработки различных типов примитивов. как будущее направление работы,Наш метод можно расширить, включив в него другие геометрические примитивы.,Такие как сферы, цилиндры и даже параметрические поверхности. через такое расширение,Может выполняться на зданиях с изогнутыми поверхностями.реконструкция。



Учебное пособие по Jetpack Compose для начинающих, базовые элементы управления и макет

Код js веб-страницы, фон частицы, код спецэффектов

【новый! Суперподробное】Полное руководство по свойствам компонентов Figma.

🎉Обязательно к прочтению новичкам: полное руководство по написанию мини-программ WeChat с использованием программного обеспечения Cursor.

[Забавный проект Docker] VoceChat — еще одно приложение для мгновенного чата (IM)! Может быть встроен в любую веб-страницу!

Как реализовать переход по странице в HTML (html переходит на указанную страницу)

Как решить проблему зависания и низкой скорости при установке зависимостей с помощью npm. Существуют ли доступные источники npm, которые могут решить эту проблему?

Серия From Zero to Fun: Uni-App WeChat Payment Practice WeChat авторизует вход в систему и украшает страницу заказа, создает интерфейс заказа и инициирует запрос заказа

Серия uni-app: uni.navigateЧтобы передать скачок значения

Апплет WeChat настраивает верхнюю панель навигации и адаптируется к различным моделям.

JS-время конвертации

Обеспечьте бесперебойную работу ChromeDriver 125: советы по решению проблемы chromedriver.exe не найдены

Поле комментария, щелчок мышью, специальные эффекты, js-код

Объект массива перемещения объекта JS

Как открыть разрешение на позиционирование апплета WeChat_Как использовать WeChat для определения местонахождения друзей

Я даю вам два набора из 18 простых в использовании фонов холста Power BI, так что вам больше не придется возиться с цветами!

Получить текущее время в js_Как динамически отображать дату и время в js

Вам необходимо изучить сочетания клавиш vsCode для форматирования и организации кода, чтобы вам больше не приходилось настраивать формат вручную.

У ChatGPT большое обновление. Всего за 45 минут пресс-конференция показывает, что OpenAI сделал еще один шаг вперед.

Copilot облачной разработки — упрощение разработки

Микросборка xChatGPT с низким кодом, создание апплета чат-бота с искусственным интеллектом за пять шагов

CUDA Out of Memory: идеальное решение проблемы нехватки памяти CUDA

Анализ кластеризации отдельных ячеек, который должен освоить каждый&MarkerгенетическийВизуализация

vLLM: мощный инструмент для ускорения вывода ИИ

CodeGeeX: мощный инструмент генерации кода искусственного интеллекта, который можно использовать бесплатно в дополнение к второму пилоту.

Машинное обучение Реальный бой LightGBM + настройка параметров случайного поиска: точность 96,67%

Бесшовная интеграция, мгновенный интеллект [1]: платформа больших моделей Dify-LLM, интеграция без кодирования и встраивание в сторонние системы, более 42 тысяч звезд, чтобы стать свидетелями эксклюзивных интеллектуальных решений.

LM Studio для создания локальных больших моделей

Как определить количество слоев и нейронов скрытых слоев нейронной сети?
