51 микроконтроллер, цифровой дисплей, регулировка скорости двигателя постоянного тока, ШИМ, вперед и назад + управление пуском и остановкой.
идеи дизайна
Основные функции системы управления ШИМ двигателем постоянного тока включают в себя: легко реализовать ускорение и замедление двигателя постоянного тока, а также вращение вперед, назад и аварийную остановку двигателя. удобно реализовать интеллектуальное управление двигателем.
Основная схема: модуль управления ШИМ двигателем постоянного тока. Эта часть схемы в основном использует порт ввода-вывода, счетчик времени, расширение внешних прерываний и т. д. микроконтроллера AT89C52 для управления ускорением и замедлением двигателя постоянного тока, а также вращением двигателя вперед и назад. также отрегулируйте скорость двигателя, что позволяет легко реализовать интеллектуальное управление вращением двигателя. В этот период микроконтроллер AT89C52 формирует импульсный сигнал с регулируемой шириной импульса и передает его на микросхему драйвера L298 для управления работой двигателя постоянного тока.
Система ШИМ-управления двигателем постоянного тока состоит из следующих схемных модулей:
Входная часть конструкции: этот модуль в основном использует независимую клавиатуру с прерываниями для реализации ускорения и замедления двигателя постоянного тока, а также управления прямым, обратным и аварийным остановом двигателя.
Часть управления конструкцией: она в основном состоит из схемы расширения внешних прерываний микроконтроллера AT89C52. Часть реализации ШИМ-управления двигателем постоянного тока в основном состоит из нескольких диодов, двигателей и модулей привода двигателей постоянного тока L298.
Конструкция дисплея: часть цифрового светодиодного дисплея для отображения в реальном времени рабочего цикла широтно-импульсной модуляции ШИМ.
Системная структура
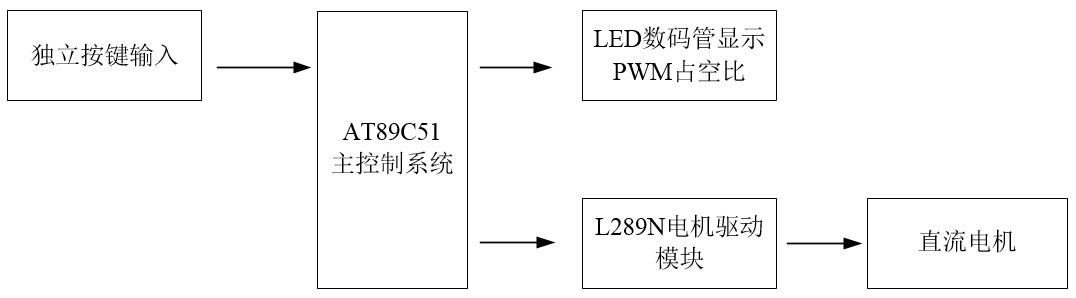
Принцип работы таков: под программным управлением микроконтроллер 51 непрерывно выдает сигнал импульсной волны с регулируемым рабочим циклом (ШИМ) в схему управления L298N через регулярные промежутки времени, тем самым изменяя скорость двигателя. Вращение вперед и назад, ускорение, замедление и остановка двигателя управляются кнопками. В то же время цифровая лампа с общим катодом «четыре в одном» отображает текущее состояние прямого и обратного хода двигателя, а также рабочий цикл ШИМ в режиме реального времени.
Моделирование Протея
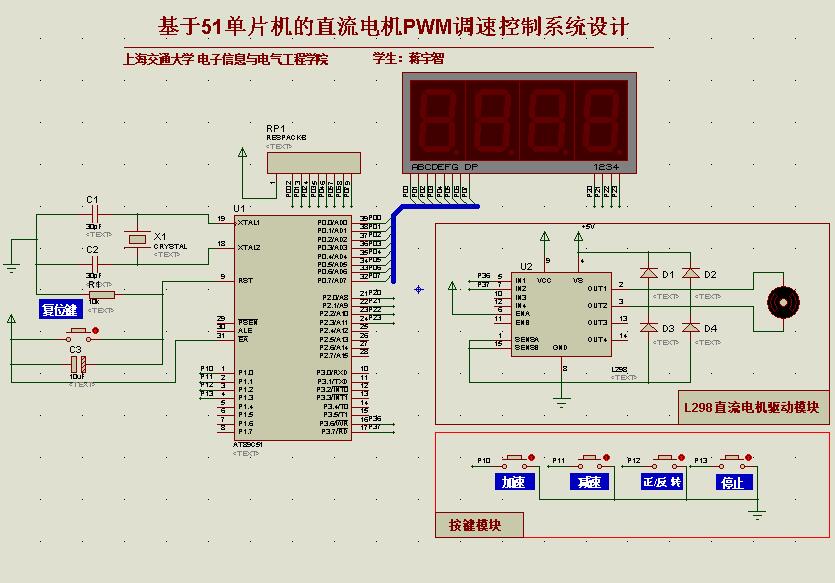
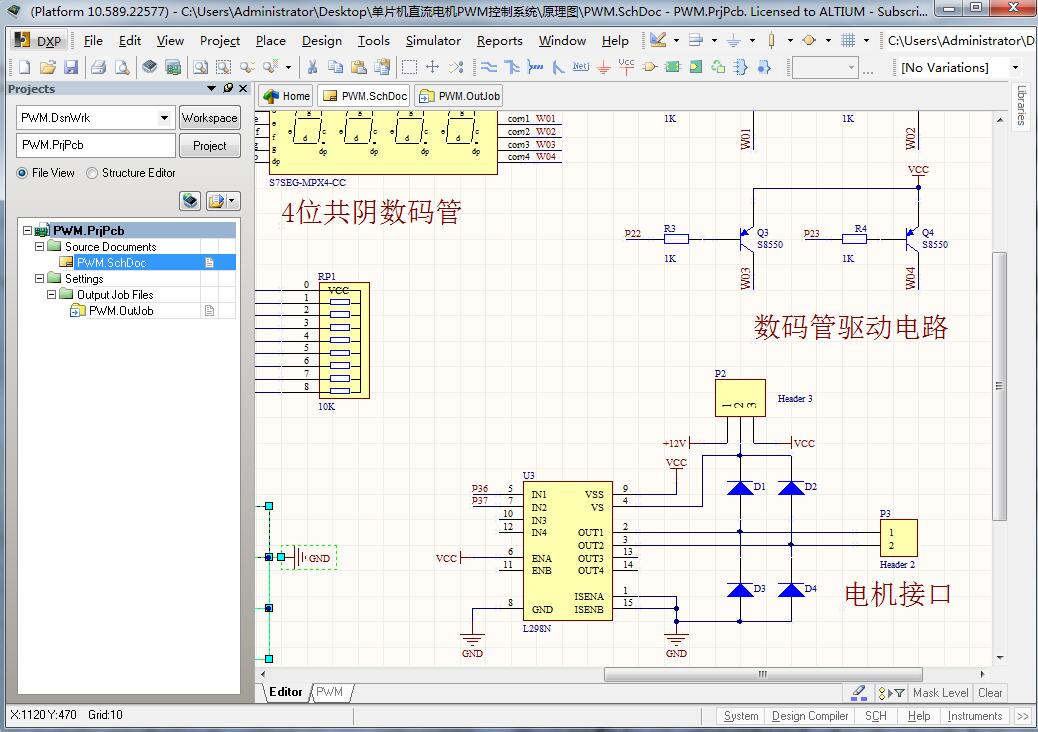
Принципиальная схема
Анализ результатов моделирования
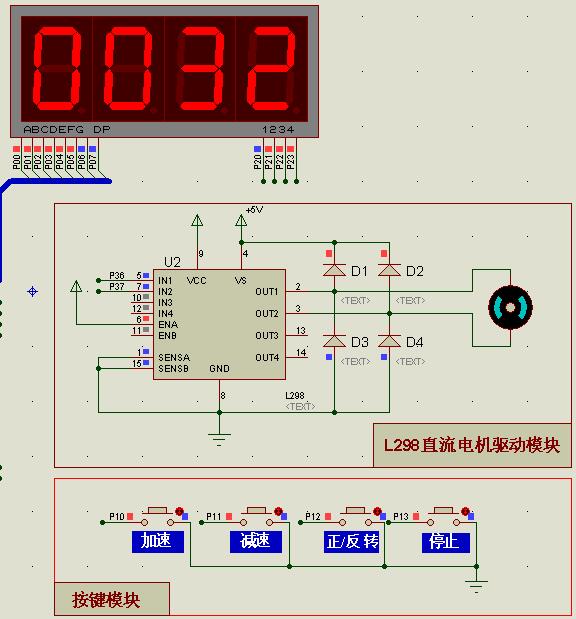
Откройте файл моделирования с суффиксом .DSN. Дважды щелкните микроконтроллер, загрузите файл PWM.hex (файл находится в папке программы C) и запустите моделирование. Эффект показан ниже. На всех четырех цифровых индикаторах отображается 0, что указывает на то, что двигатель находится в режиме ожидания вращения вперед.
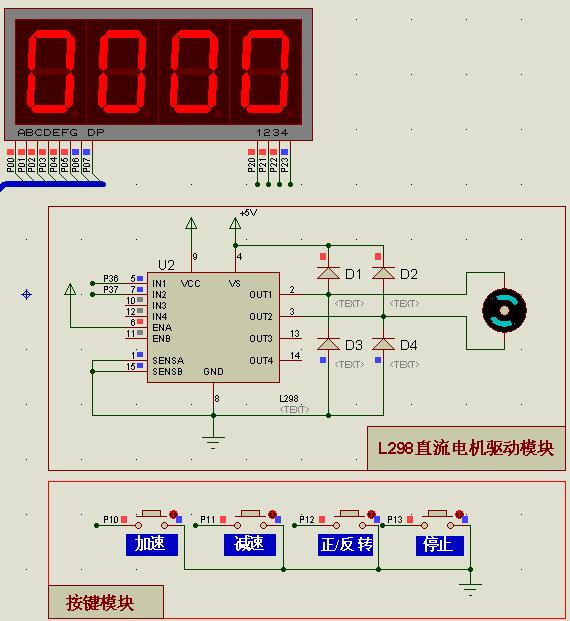
Четырехзначная цифровая трубка, первая цифра представляет прямое и обратное вращение двигателя (0 представляет вращение вперед, 1 представляет обратное вращение), а последние три цифры обозначают рабочий цикл ШИМ. Диапазон регулировки составляет 0–100, что соответствует значению. используется для обозначения скорости двигателя.
Чем больше рабочий цикл ШИМ, тем быстрее вращается двигатель.
Нажмите кнопку акселератора, чтобы изменить рабочий цикл ШИМ, и двигатель начнет ускоряться. Например, мы установили рабочий цикл ШИМ равным 32%, и эффект будет следующим.
Таким же образом мы также можем настроить реверс двигателя, нажав кнопку, с рабочим циклом 45%, и эффект будет следующим.
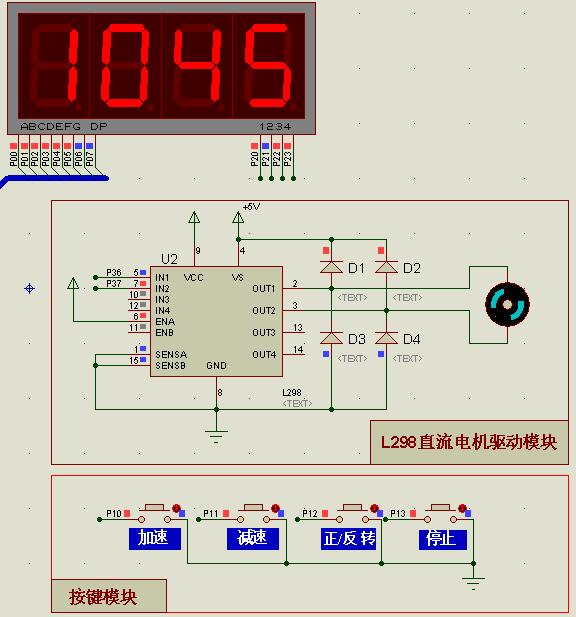
Подводя итог, можно сказать, что эффект операции моделирования соответствует проектным требованиям.
Содержание ресурса
(1) Дипломная работа по проектированию системы ШИМ-регулирования скорости двигателя постоянного тока на базе 51 микроконтроллера;
(2)Моделирование Протеядокумент;
(3) файлы программ C;
(4)Принципиальная схемадокумент;
(5) Блок-схема Visio;
(6) Список компонентов;
(7) Справочные материалы;
Скриншот ресурса



Углубленный анализ переполнения памяти CUDA: OutOfMemoryError: CUDA не хватает памяти. Попыталась выделить 3,21 Ги Б (GPU 0; всего 8,00 Ги Б).

[Решено] ошибка установки conda. Среда решения: не удалось выполнить первоначальное зависание. Повторная попытка с помощью файла (графическое руководство).

Прочитайте нейросетевую модель Трансформера в одной статье

.ART Теплые зимние предложения уже открыты

Сравнительная таблица описания кодов ошибок Amap

Уведомление о последних правилах Points Mall в декабре 2022 года.

Даже новички могут быстро приступить к работе с легким сервером приложений.

Взгляд на RSAC 2024|Защита конфиденциальности в эпоху больших моделей

Вы используете ИИ каждый день и до сих пор не знаете, как ИИ дает обратную связь? Одна статья для понимания реализации в коде Python общих функций потерь генеративных моделей + анализ принципов расчета.

Используйте (внутренний) почтовый ящик для образовательных учреждений, чтобы использовать Microsoft Family Bucket (1T дискового пространства на одном диске и версию Office 365 для образовательных учреждений)

Руководство по началу работы с оперативным проектом (7) Практическое сочетание оперативного письма — оперативного письма на основе интеллектуальной системы вопросов и ответов службы поддержки клиентов

[docker] Версия сервера «Чтение 3» — создайте свою собственную программу чтения веб-текста

Обзор Cloud-init и этапы создания в рамках PVE

Корпоративные пользователи используют пакет регистрационных ресурсов для регистрации ICP для веб-сайта и активации оплаты WeChat H5 (с кодом платежного узла версии API V3)

Подробное объяснение таких показателей производительности с высоким уровнем параллелизма, как QPS, TPS, RT и пропускная способность.

Удачи в конкурсе Python Essay Challenge, станьте первым, кто испытает новую функцию сообщества [Запускать блоки кода онлайн] и выиграйте множество изысканных подарков!

[Техническая посадка травы] Кровавая рвота и отделка позволяют вам необычным образом ощипывать гусиные перья! Не распространяйте информацию! ! !

[Официальное ограниченное по времени мероприятие] Сейчас ноябрь, напишите и получите приз

Прочтите это в одной статье: Учебник для няни по созданию сервера Huanshou Parlu на базе CVM-сервера.

Cloud Native | Что такое CRD (настраиваемые определения ресурсов) в K8s?

Как использовать Cloudflare CDN для настройки узла (CF самостоятельно выбирает IP) Гонконг, Китай/Азия узел/сводка и рекомендации внутреннего высокоскоростного IP-сегмента

Дополнительные правила вознаграждения амбассадоров акции в марте 2023 г.

Можно ли открыть частный сервер Phantom Beast Palu одним щелчком мыши? Супер простой урок для начинающих! (Прилагается метод обновления сервера)

[Играйте с Phantom Beast Palu] Обновите игровой сервер Phantom Beast Pallu одним щелчком мыши

Maotouhu делится: последний доступный внутри страны адрес склада исходного образа Docker 2024 года (обновлено 1 декабря)

Кодирование Base64 в MultipartFile

5 точек расширения SpringBoot, супер практично!

Глубокое понимание сопоставления индексов Elasticsearch.

15 рекомендуемых платформ разработки с нулевым кодом корпоративного уровня. Всегда найдется та, которая вам понравится.
